Ankle joint rehabilitation training device driven by pneumatic muscles for wheelchair
A pneumatic muscle and rehabilitation training technology, applied in the field of training equipment, can solve the problems that cannot be used anytime and anywhere, electrical components cannot be waterproof, and restrict the use of equipment, so as to achieve therapeutic actions that are more in line with biological characteristics, improve activity and flexibility, Use a wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
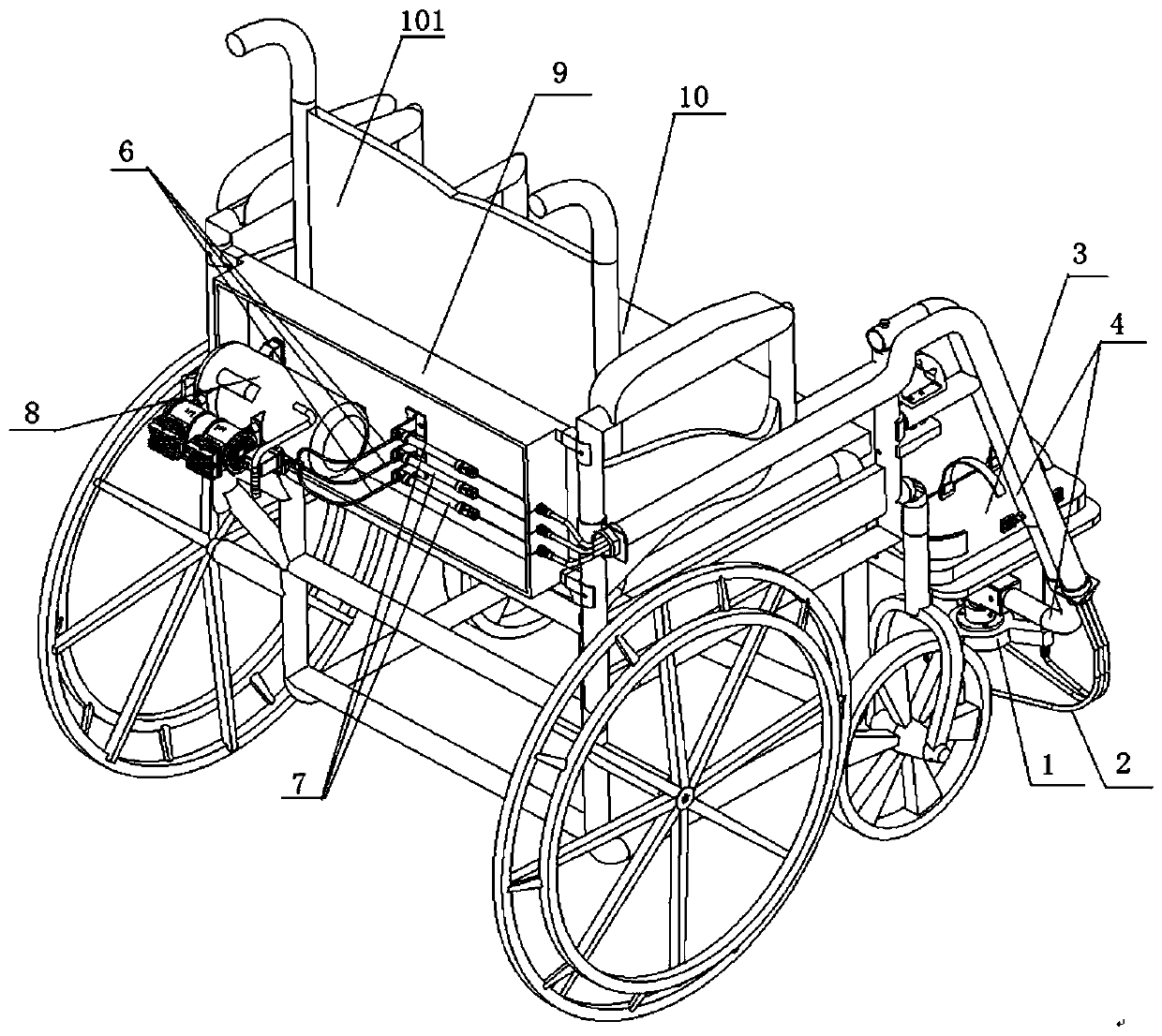
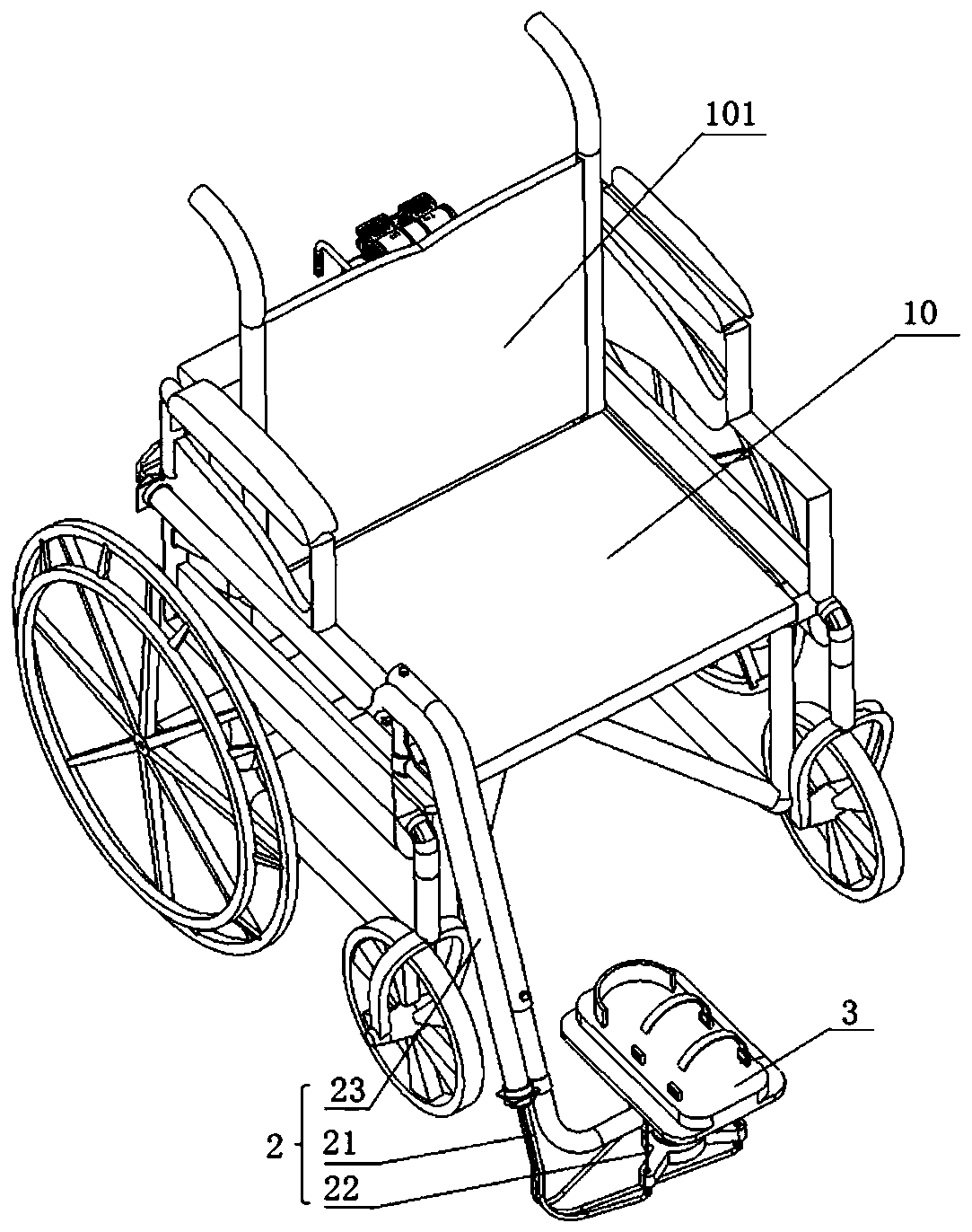
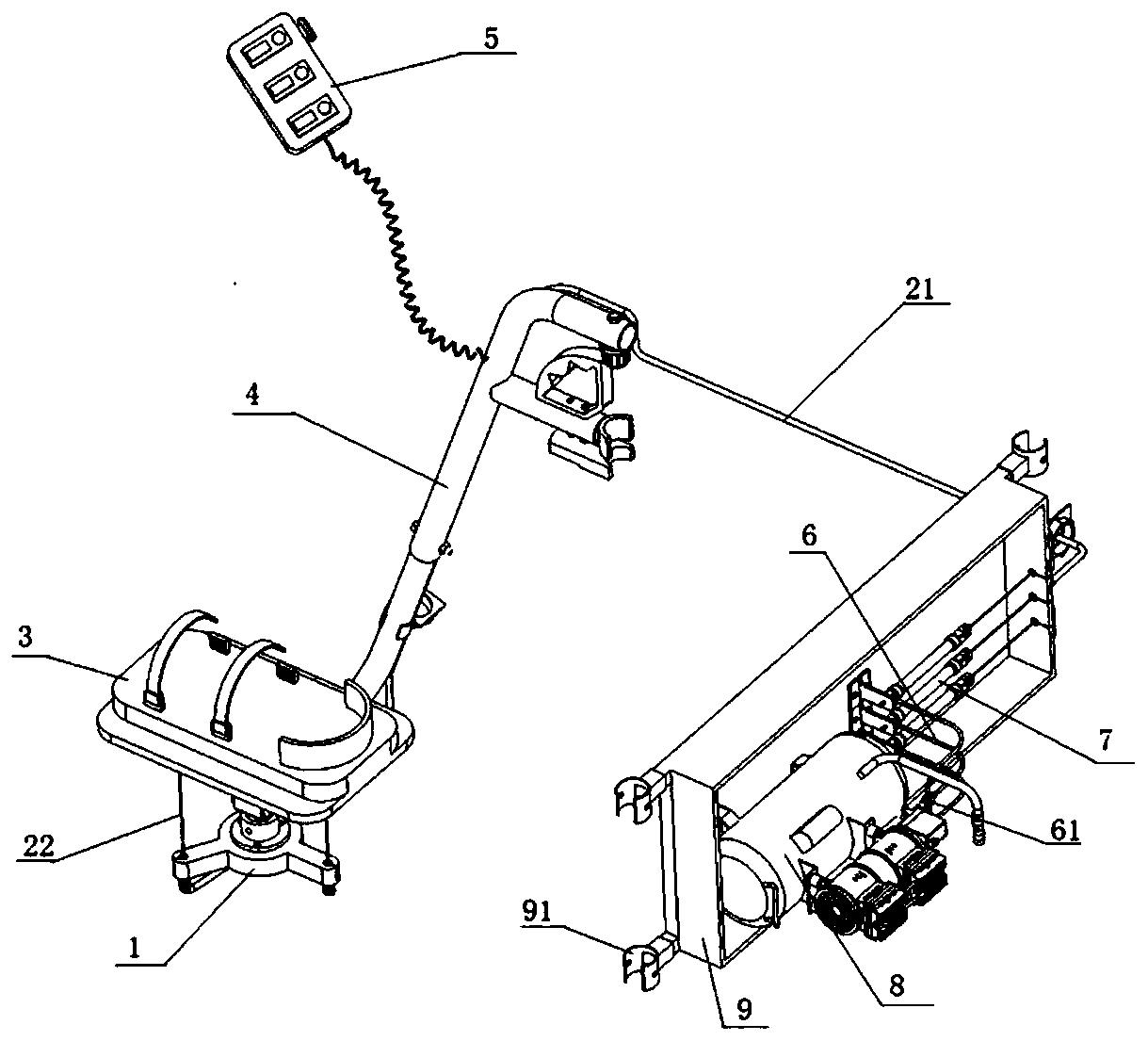
[0035] A pneumatic muscle-driven ankle joint rehabilitation training device for wheelchairs, such as Figure 1-7As shown, it includes a controller, an air pump 8, a pedal mechanism and a plurality of pneumatic artificial muscles 7, wherein: a plurality of pneumatic artificial muscles 7 are independently connected to the air pump 8 through the air pipe 6, and each air pipe 6 is provided with a proportional control valve 61; The mechanism is detachably installed on the wheelchair 10, including a base 1 and a foot pedal 3 movably connected to the base 1. A plurality of pneumatic artificial muscles 7 are independently connected to the foot pedal 3 through the casing steel rope 2 via the base 1. It is used to drive the pedal 3 to move, and then drive the foot fixed on the pedal to perform three movements: dorsiflexion, plantarflexion, varus and valgus, adduction and abduction; the controller and the air pump 8 And each proportional control valve 61 communication connection.
[003...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com