A UAV track planning method based on flying fish algorithm
A track planning, UAV technology, applied in three-dimensional position/track control, instruments, control/regulation systems, etc., can solve problems such as weak adaptability, slow convergence speed, and poor reliability of UAV track planning. Achieve the effect of enhancing global search ability, fast convergence speed and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
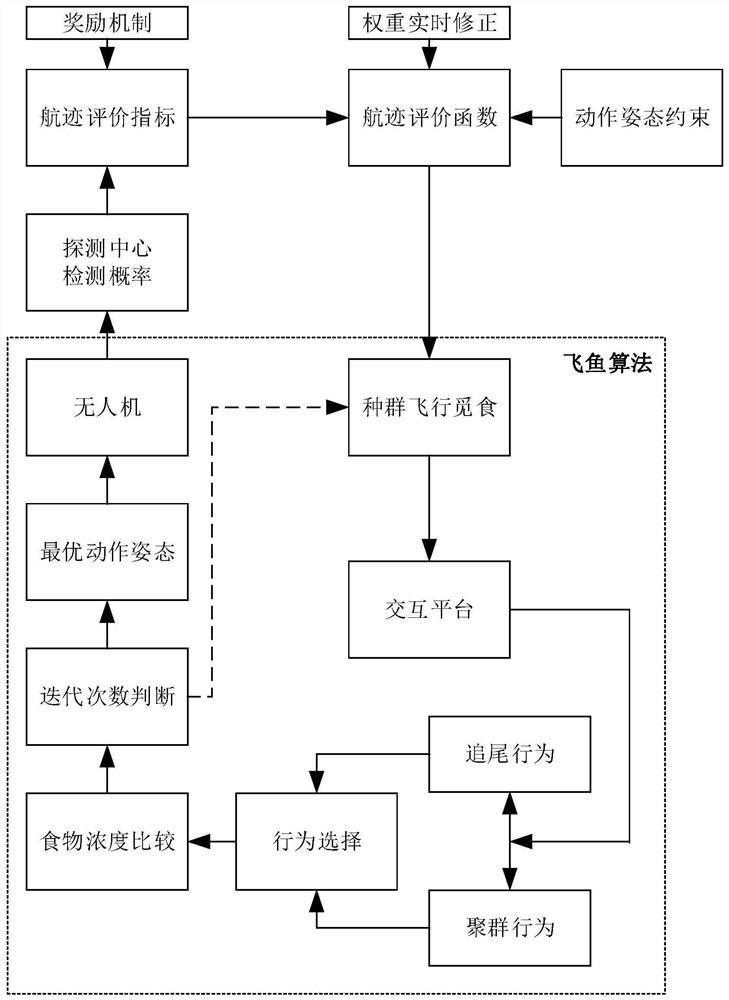
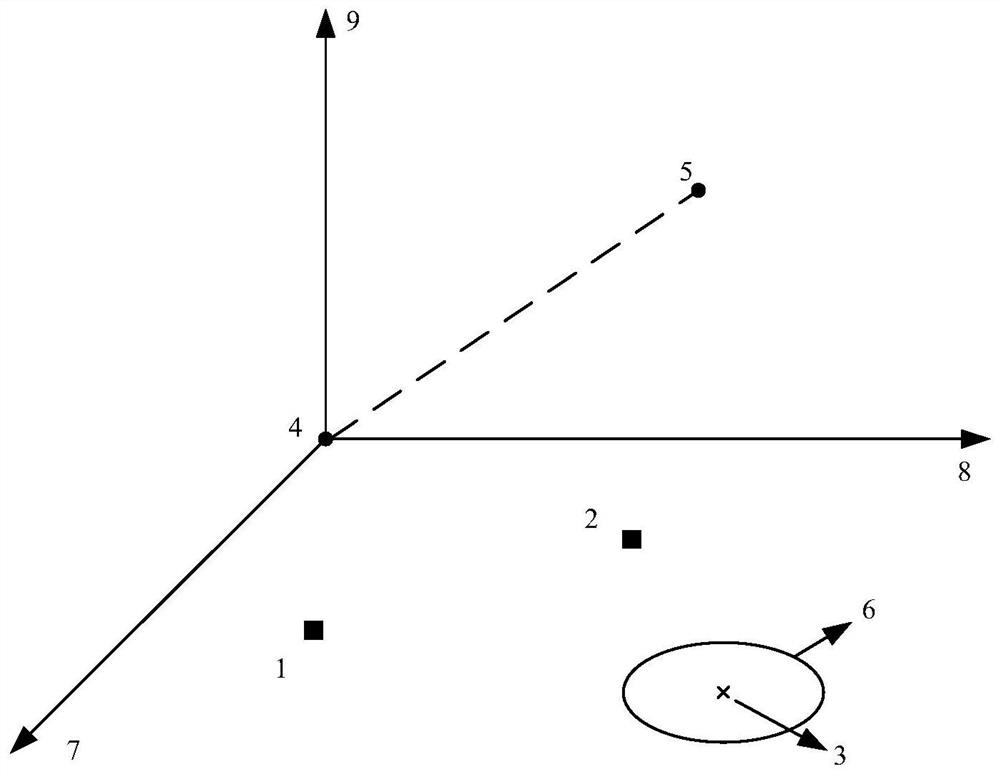
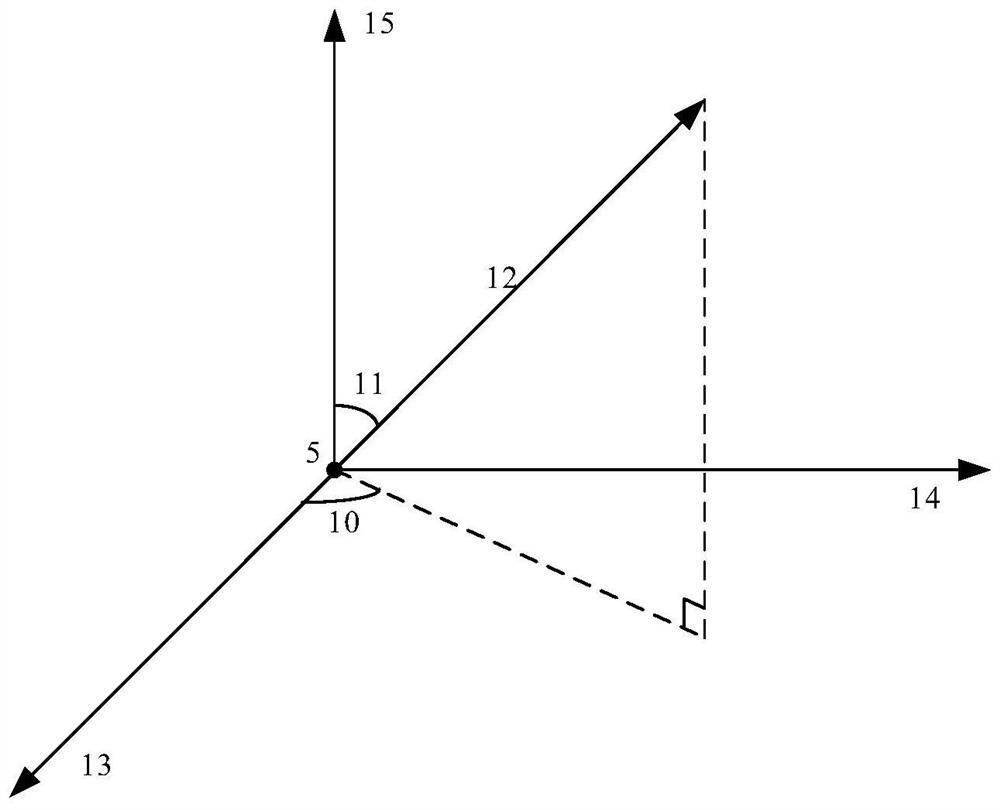
[0055] The purpose of the present invention is to propose a UAV trajectory planning method, mainly to solve the problems of weak adaptability, poor reliability, high complexity and slow convergence speed in UAV trajectory planning. Construct the flight motion model, design the action attitude vector in the spherical coordinate system, use the effectiveness value of the detection probability and the UAV reward and punishment mechanism to construct the track evaluation function, and propose a new flying fish algorithm to optimize the value of the track evaluation function to obtain The optimal solution will eventually control the UAV with the optimal motion attitude data of the generated UAV, thus realizing the accurate generation of UAV track planning. This method has a simple model, fast convergence speed, high accuracy, and good relia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com