Universal mobile data acquisition and processing tunnel detection system for multi-scanner
A data acquisition and detection system technology, applied in the field of surveying and mapping engineering, can solve the problems of low measurement accuracy, limited index parameters, and low degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
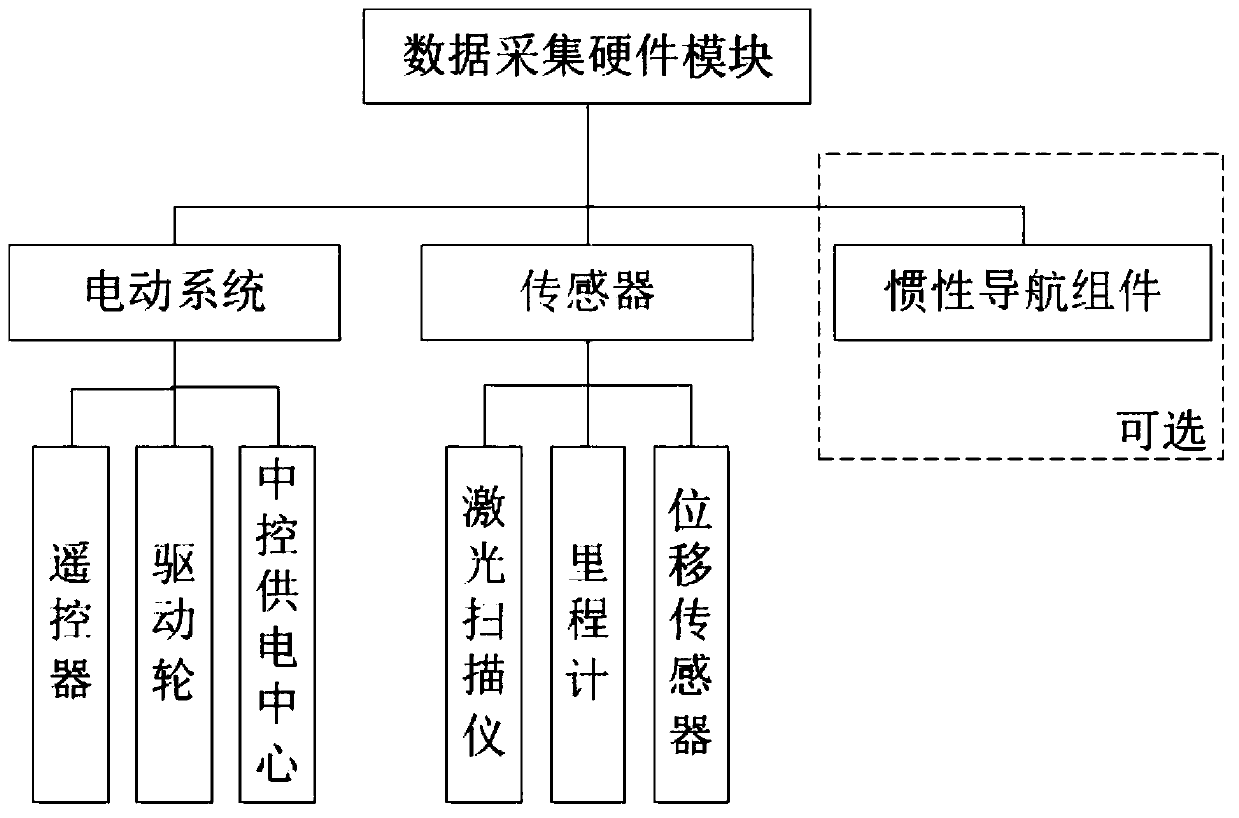
[0055] A multi-scanner general mobile data acquisition and processing tunnel detection system, comprising a data acquisition hardware module, a data acquisition and preprocessing module, and a data postprocessing module; the data acquisition hardware module and the data acquisition and preprocessing module connected, the data acquisition and preprocessing module is connected to the data postprocessing module.
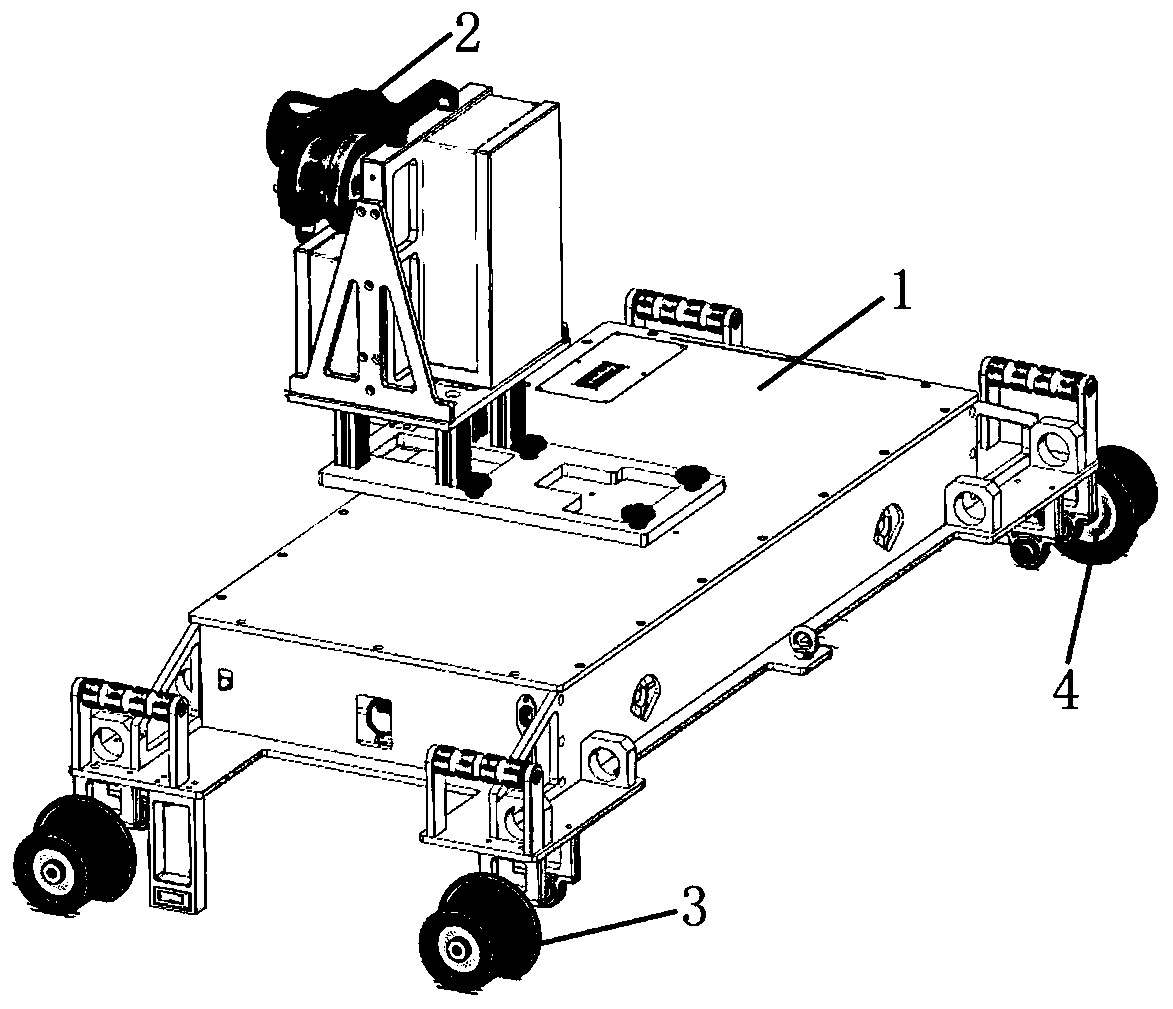
[0056] as attached figure 1 As shown, the data acquisition hardware module includes an electric system, sensors and a vehicle body 1, and the sensors include a laser scanner 2, an odometer 4 and a displacement sensor.
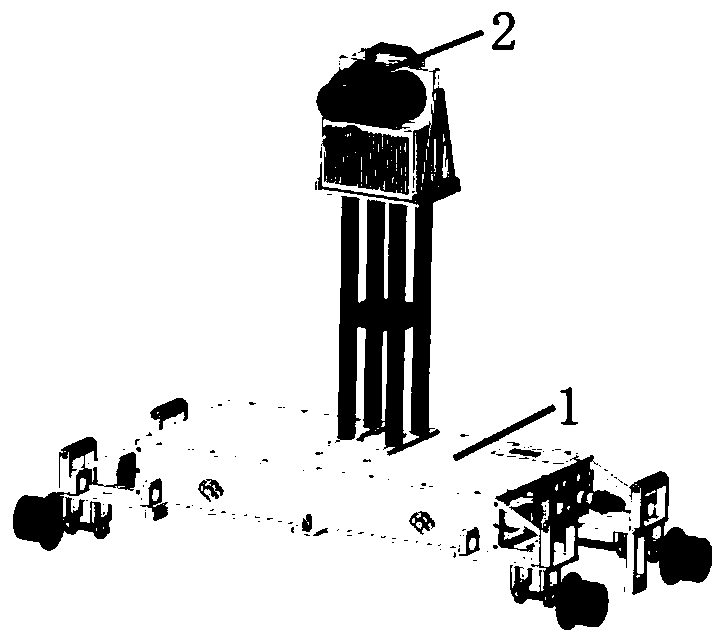
[0057] as attached figure 2 As shown, the car body 1 has an "I" structure as a whole to ensure its stability in operation. Except for the laser scanner 2 and the odometer 4, almost all other components of the system are located inside the car body 1.
[0058] The laser scanner 2 is installed in the middle of the car body 1 through a bracket. The heigh...
Embodiment 2
[0081] Based on the above-mentioned embodiment 1, the similarities will not be described in detail. The difference is that the data acquisition hardware module also includes an inertial navigation component. One is to provide parameters related to orbit detection for orbit compliance detection, and the other is to realize Joint measurement with control points, and realize conversion to absolute coordinates for data collection.
[0082] The inertial navigation component collects the acceleration and angular velocity of the moving carrier autonomously by means of the inertial component, and can solve the velocity and position of the carrier in the navigation coordinate system; the combination of the inertial navigation component is fixedly installed on the same base and maintains consistent relative motion A collection of inertial sensors for orientation, the inertial navigation component includes three gyroscopes and three accelerometers.
[0083] The strapdown inertial navigat...
Embodiment 3
[0091] Based on the above-mentioned embodiment 2, the track smoothness detection module includes calculating the deviation between the measured data and the design data, and simulating the design data, and the simulating design data includes calculating the linear parameters of the simulating design data, and calculating the relative minimum fitting design data of the deviation.
[0092] The deviation between the calculated measured data and the design data is calculated by using the forward and reverse calculation method of line measurement, wherein the deviation includes lateral deviation, elevation deviation and superelevation deviation; calculating the lateral deviation and vertical deviation between the track measured data and the design data, The key factor is to determine the mileage information in the design data corresponding to the measured data points, and calculate the deviation based on this.
[0093] as attached Figure 8 As shown, AB is a certain section of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com