A Kalman filter for kinect doctor's perspective tracking
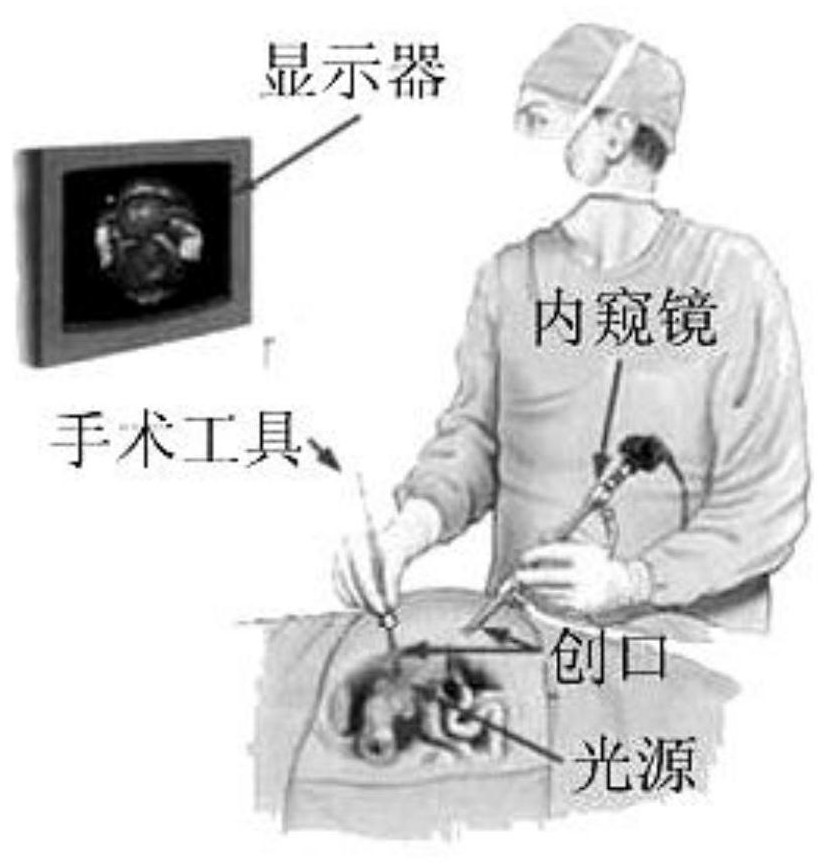
A Kalman filter, a doctor's technology, applied in the fields of medicine, three-dimensional stereo imaging, and digital image processing, which can solve the problems of not reflecting the multi-view three-dimensional shape of the inner cavity, affecting the continuity of the doctor's surgical operation, and inconvenient surgical operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment 1
[0043]This embodiment is an embodiment of the intramid transparent observation of the body table projection virtual transparent observation in micro-invasive surgery.
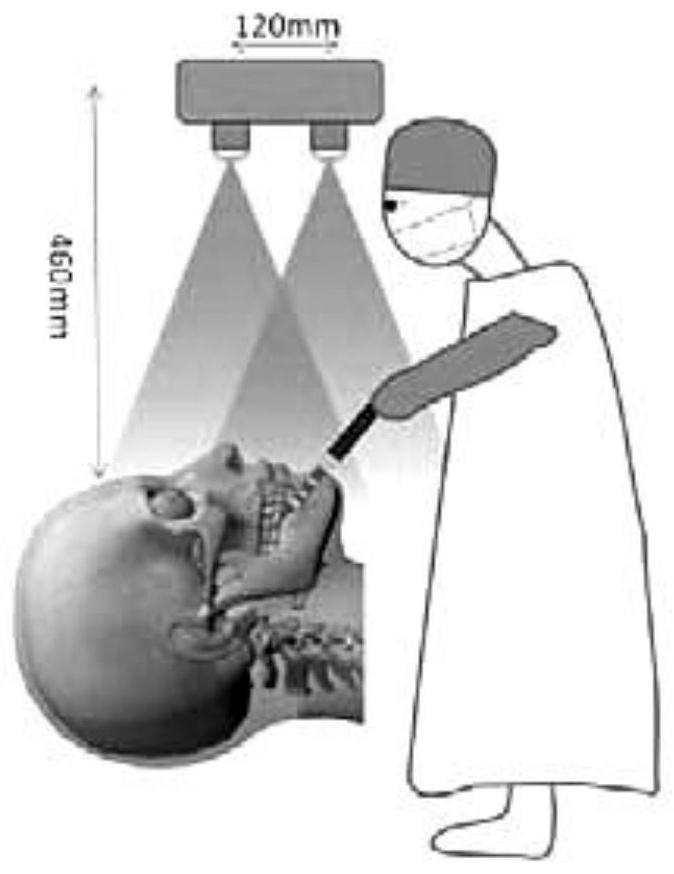
[0044]The microeconomic transparent observation of the micro-transparent observation of the inner cavity method, the corresponding body surface projection system, such asFigure 4 As shown, the technical roadmap of this method is likeFigure 5 As shown, including the following steps:
[0045]Step A, the Kinect doctor is tracked, used to determine the current head position and visual angle of the doctor;
[0046]Step B, the PTAM lumen 3D modeling, PTAM is Parallel Tracking and mapping for generating a lumen three-dimensional model that can rotate with the doctor's perspective as described by step A;
[0047]Step c, generate a patient's body surface projection image sequence, based on the doctor's viewing angle of step A, projection to the patient's body surface.
specific Embodiment 2
[0049]This embodiment is an embodiment of a Kinect doctor perspective tracking method.
[0050]The view method of the Kinect doctor of this embodiment can be alone, and further define the specific embodiments; the Kinect doctor's viewing method, such asFigure 6 As shown, including the following steps:
[0051]Step A1, select the pupil, the depth data of the nose tip as a key point, establish a doctor's perspective mathematical model;
[0052]Step A2, predict the doctor's perspective and correct tracking data with the Kalman filter and correct tracking data;
[0053]Step A3, analyze Kinect and the doctor's head, the patient's body surface, the inner cavity between the patient, the projector, and uniform coordinate system, design the patient's body surface projection system parameters.
specific Embodiment 3
[0055]This embodiment is the Carman filter embodiment.
[0056]The karman filter of the present embodiment can be alone or further defined by the second embodiment; the Kalman filter is specifically:
[0057]In the Kinect data in the T time, it defines its Kalman filter status vector xtAnd observe vector Ztfor:
[0058]Xt= (X (t), y (t), z (t), Vx(t), Vy(t), Vz(t))
[0059]Zt= (X (t), y (t), z (t))
[0060]Among them, X (t), y (t) and z (t) are three-dimensional coordinates of the nose center, Vx(t), Vy(t) and Vz(t) is the center of the nose;
[0061]According to this, the column Kalman system equation is:
[0062]Xt+1= AXt+ But+ GWt
[0063]Zt+1= HXt+ Vt
[0064]Where, a is the state matrix, B is a control matrix, approximately 0 when there is no control amount in the face motion, G is a driving matrix, H is a observation matrix, UtIs control vector, WtXtKinect measurement error and noise, VtIt is observed to observe errors and noise.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com