Wheel leg type multi-mode patrol inspection and rescue robot
A robot and multi-mode technology, applied in the field of robotics, can solve problems such as disaster area awareness, unfavorable search and rescue, secondary damage, etc., and achieve the effects of weight reduction, simple wheel-leg switching process, and increased stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with specific embodiments.
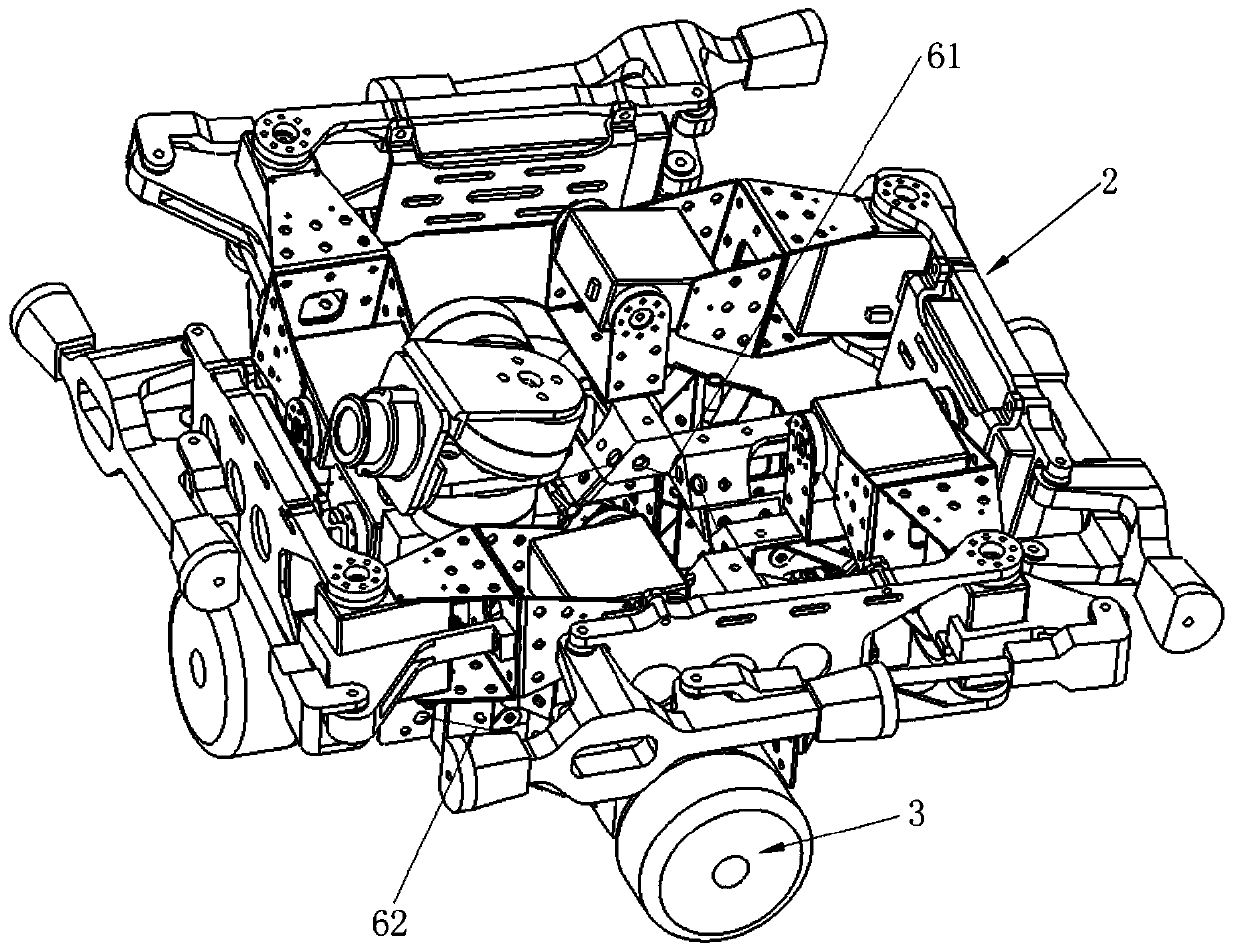
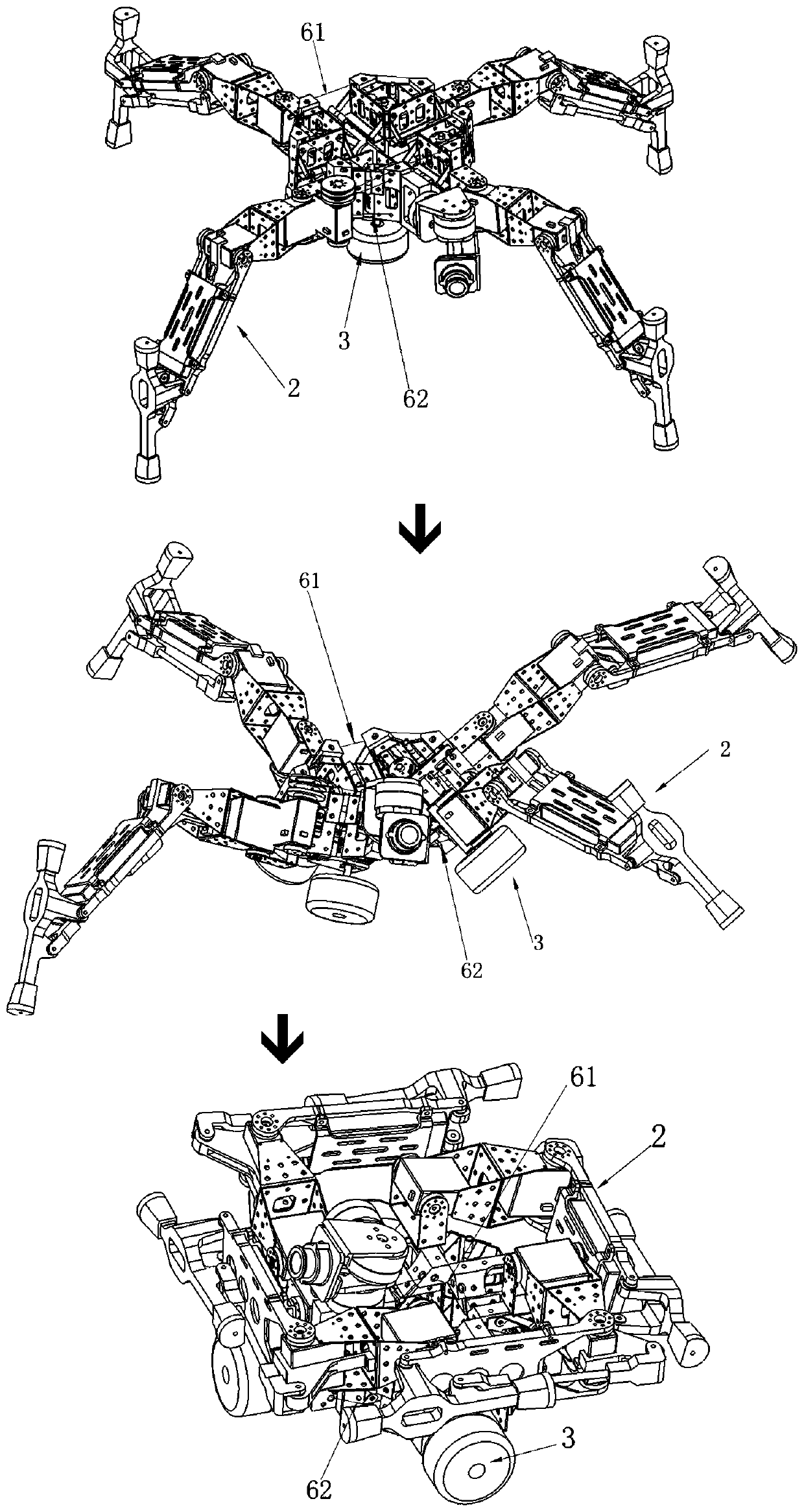
[0024] Such as Figure 1 to Figure 3 As shown, the wheel-legged multi-mode patrol search and rescue robot in this embodiment is mainly divided into two forms of motion, one is the leg mode and the other is the wheel mode, which provides strong adaptability under complex terrain. The four-legged movement and the high-efficiency wheeled movement in a flat environment can be flexibly switched between the two sports modes through the multi-stable rack on it, which has strong flexibility and stability.
[0025] The robot includes a multi-stable frame, a moving leg 2, an omni-directional wheel 3 with a drive motor 31, a steering gear assembly and an external sensor 5. The multi-stable frame includes four basic units. The four basic units form a polygonal structure, and two adjacent basic units are connected by energy storage hinges 12. Each basic unit is composed of two connecting bl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com