A tour guide robot face device with a human eye concentration identification function and control
A tour guide robot and focus technology, applied in computer parts, program-controlled manipulators, instruments, etc., can solve the problems of adjusting the robot's facial expressions, low intelligence, and poor robot interaction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
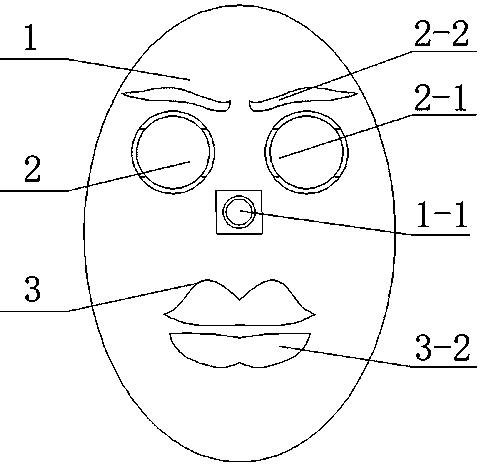
[0066] A tour guide robot face device with the function of human eye concentration recognition, such as figure 1 , figure 2 As shown, it includes a robot face 1, an eye mechanism 2, a mouth mechanism 3 and a control system 4; the robot face 1 is a plate-shaped structure, and the eye mechanism 2 and mouth mechanism 3 are arranged on the robot face 1 surface;
[0067] The robot face 1 includes a vision module 1-1, a voice module 1-2 and a face support 1-3;
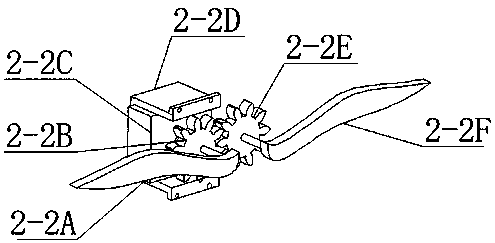
[0068] The eye mechanism 2 includes an eye structure 2-1 and an eyebrow structure 2-2;
[0069] The mouth mechanism 3 includes a mouth action mechanism 3-1 and a lip structure 3-2;
[0070] The control system 4 mainly includes a first chip and a second chip, the first chip is connected to the vision module 1-1, the second chip is connected to the eye mechanism 2 and the mouth mechanism 3, and the first chip is connected to the vision module 1-1. The chip communicates with the second chip through the UART0 serial port. ...
specific Embodiment approach 2
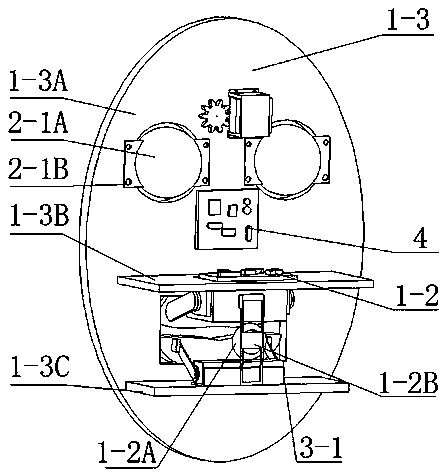
[0071] Such as figure 2 , image 3 , Figure 4 As shown, on the basis of Embodiment 1, the face support 1-3 includes a face frame 1-3A, a first support 1-3B and a second support 1-3C, and the face frame 1-3A The position of the human nose on the front surface is processed with a circular through hole, which is used for the positioning and installation of the camera probe in the vision module 1-1; the voice module 1-2 is arranged on the upper surface of the first support 1-3B, so The voice module 1-2 includes a speaker 1-2A, a speaker bracket 1-2B and a power amplifier module, and the speaker 1-2A is arranged perpendicular to the first support 1-3B and the second support 1-3C, and is arranged on the The rear position between the first support 1-3B and the second support 1-3C.
[0072] In this embodiment, the visual module 1-1 is the prior art, and the manufacturer is Guangdong Jiaxin Microelectronics franchise store, and the model is OV7670.
[0073] In this embodiment, th...
specific Embodiment approach 3
[0083] Such as Figure 10 , Figure 11 As shown, a control method based on the face device of the guide robot with the function of human eye concentration recognition includes the following steps:
[0084] Step S1, the vision module adopts the VideoCapture method of Opencv to collect the environmental information in front of the face device;
[0085] Step S2, processing image recognition face information;
[0086] Step S3, inputting the face information into the pre-trained RBF neural network human eye concentration prediction model;
[0087] Step S4, outputting Labels concentration information after prediction and classification;
[0088] Step S5, converting the above information into ASCII codes and transmitting them to the second chip through serial port communication;
[0089] Step S6, the second chip controls the corresponding steering gear to complete the corresponding facial expression according to the ASCII code received by the serial port, and at the same time, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com