A mine detection control system and mine detection method based on cooperation between an unmanned boat and a robotic fish
A technology for robotic fish and unmanned boats, applied in radio wave measurement systems, instruments, measurement devices, etc., can solve problems such as high risk, high cost, and difficulty, and achieve improved safety, low swing frequency, and reduced energy. effect of loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
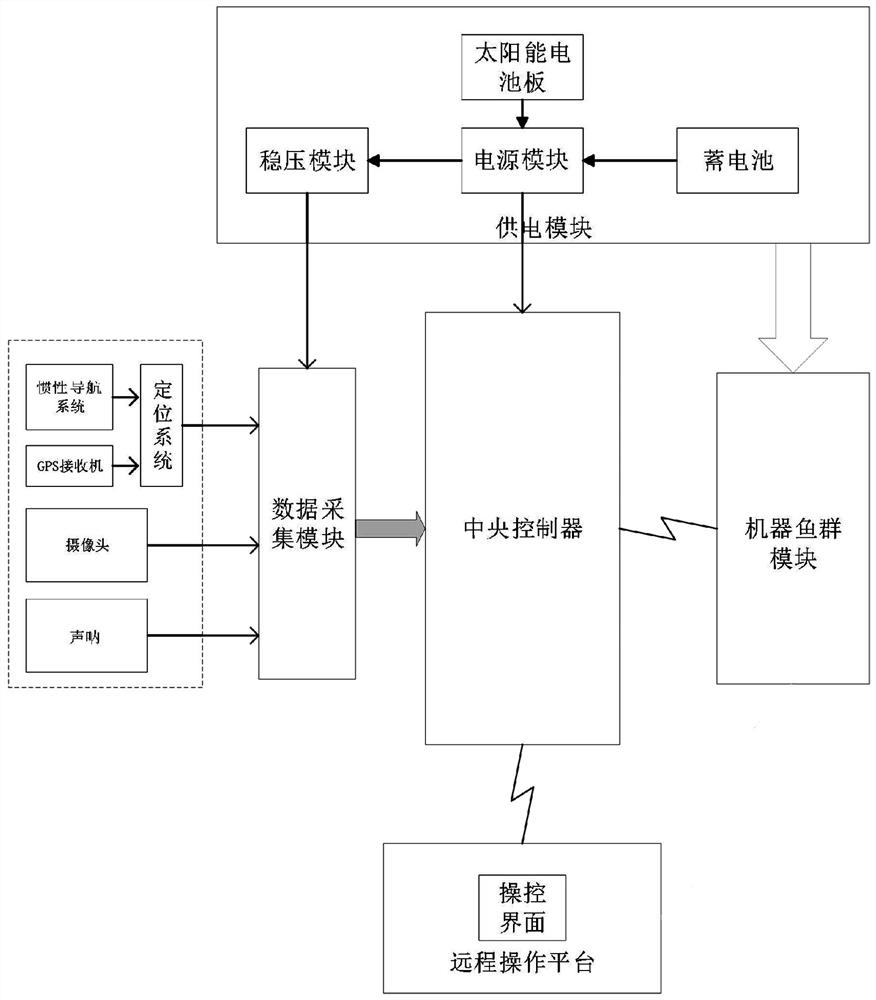
[0027] Such as figure 1 A mine detection and control system for cooperation between an unmanned boat and a robotic fish is shown, including a central controller on the unmanned boat, a power supply module connected to the central controller, a data acquisition module, a remote operation platform and a robotic fish Group module; there is a one-way signal transmission between the central controller and the data acquisition module, and the data acquisition module transmits the signal to the central controller; there is a wireless two-way signal transmission between the central controller and the remote operation platform and the robotic fish school module , it is convenient for the central controller to read and process the measurement information of the robotic fish school module and the data acquisition module, and transmit the processed information to the remote operation platform, so as to facilitate the remote control of the unmanned boat and robotic fish.
[0028] The power...
Embodiment 2
[0037] Utilize a kind of unmanned boat described in embodiment 1 and the mine detection control system that robot fish cooperates to carry out the method for mine detection, comprising the following steps:
[0038] S01. After the unmanned boat receives the mine detection task in the designated sea area, it determines the position signal and heading signal of the unmanned boat through the positioning system, and sends the position signal and heading signal to the central controller, and the central controller receives the signal And after processing, the signal is wirelessly transmitted to the remote operation platform, the remote operation platform sends a path signal to the central controller through the touch screen, the central controller receives the path signal, and the central controller uses the internal control algorithm to control the unmanned boat according to the plan The path is traced to reach the designated mission sea area.
[0039] S02. When the unmanned boat a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com