Control system for tracked robot with stair climbing function and method
A control system and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of high user requirements and long operation time, and achieve simple structure, strong obstacle surmounting ability, fast and stable climbing The effect of stairs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific implementation manners of the present invention will be further described in detail below in conjunction with the drawings and specific embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
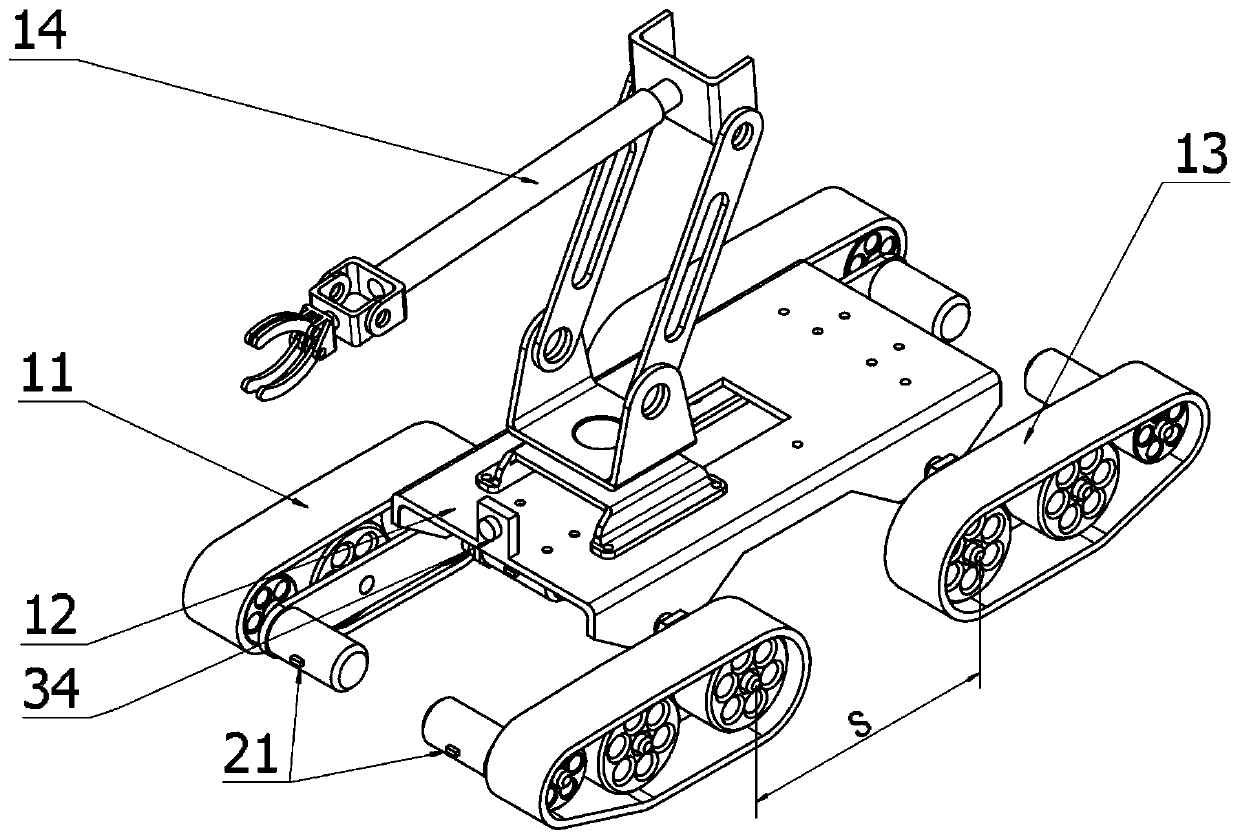
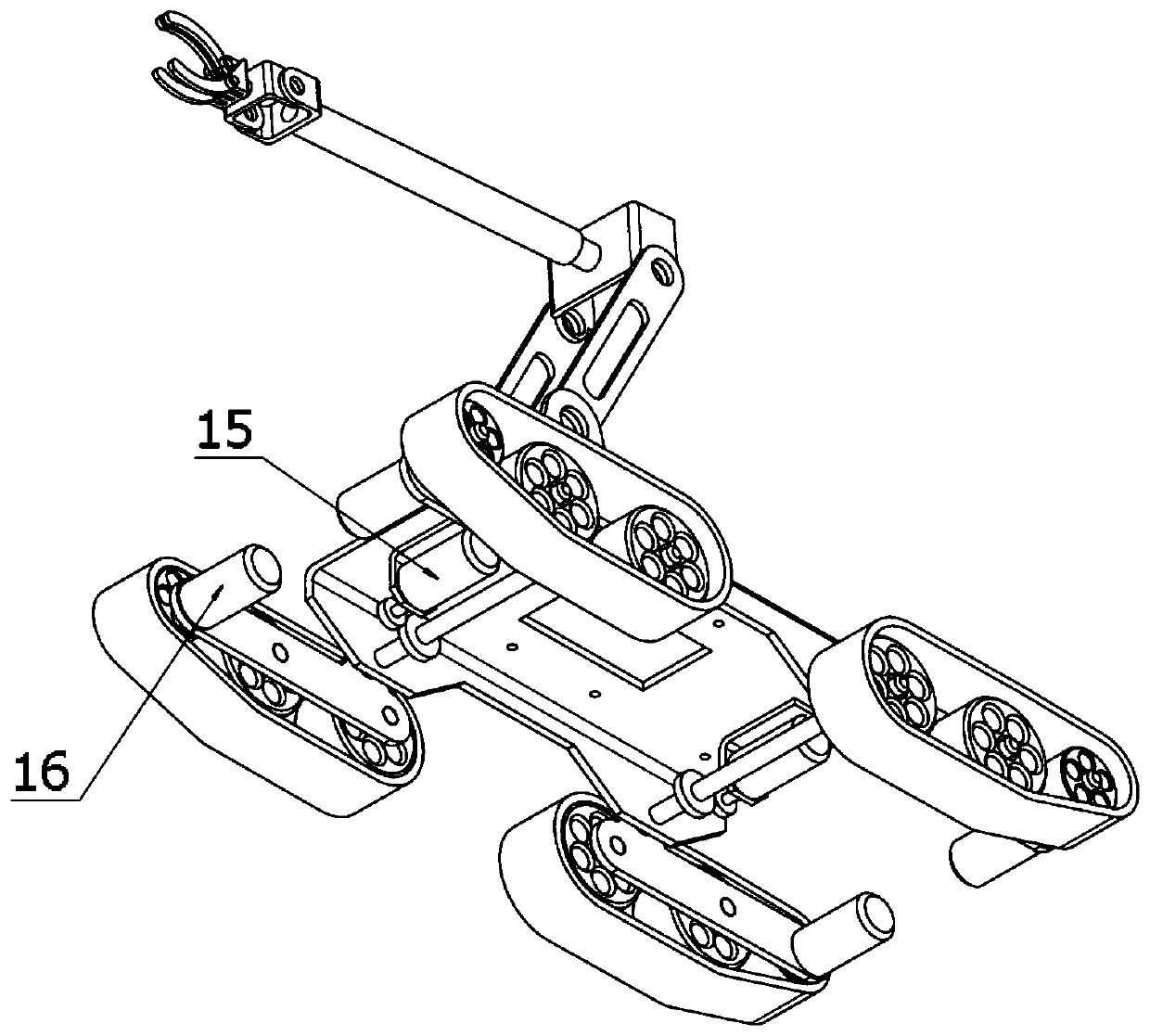
[0040] see figure 1 The crawler robot control system with stair climbing function of the present invention is used to control the climbing of a crawler robot with stair climbing function on the stairs. Described crawler robot comprises front-end traveling mechanism 11, chassis 12, rear-end traveling mechanism 13, mechanical arm 14, servomotor 15 and DC drive motor 16; 12, and can realize fixed-axis rotation relative to the chassis 12. Two front and rear servomotors 15 that are fixed on the described chassis 12 are used for controlling the fixed-axis rotation of described front-end traveling mechanism 11, rear-end traveling mechanism 13 respectively. Wherein 4 motors that ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com