


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Lower limb knee joint continuous motion estimation method based on electromyographic signals
A technology of electromyographic signal and motion estimation, applied in the field of pattern recognition, can solve not many problems, and achieve good prediction effect, smoothness and robustness improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
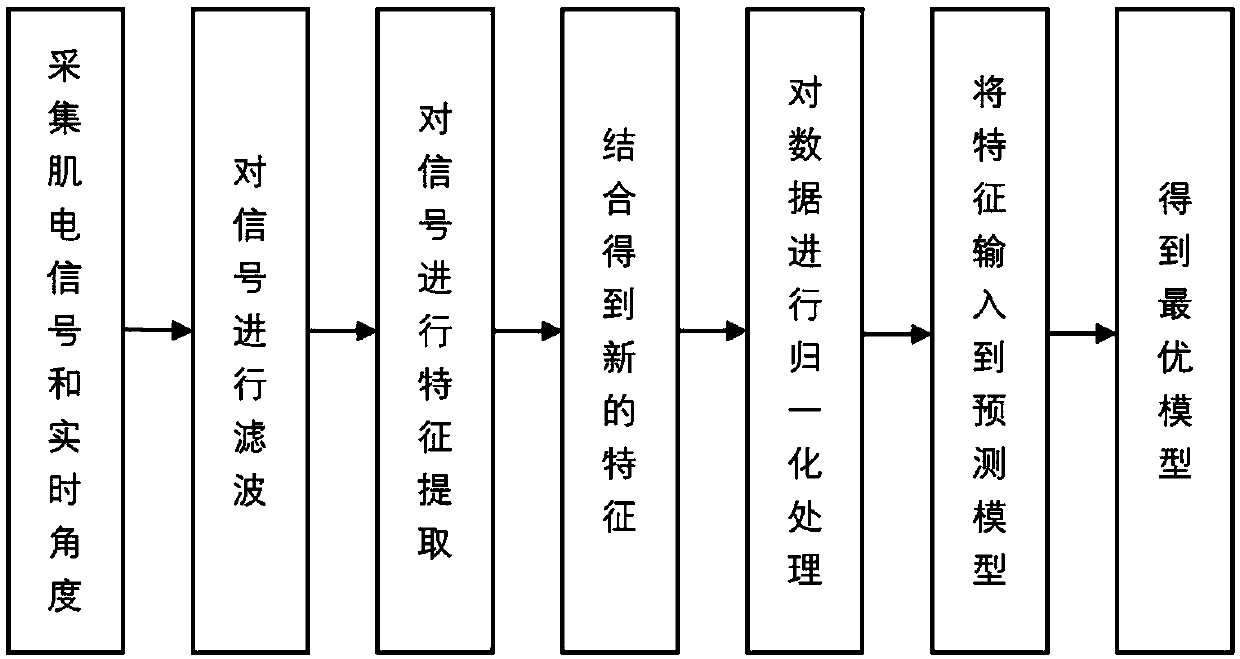
[0053] Such as figure 1 As shown, this embodiment includes the following steps:
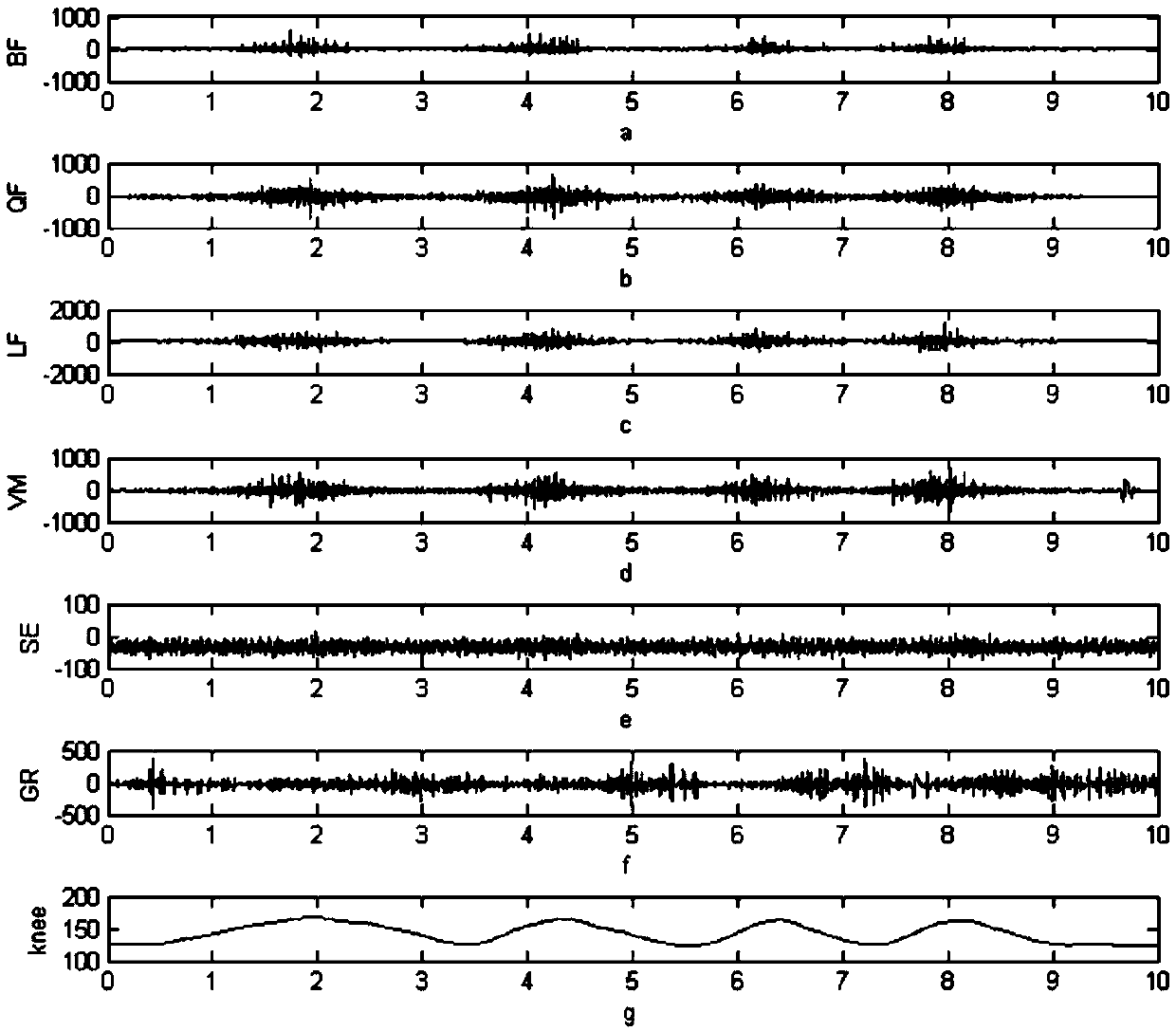
[0054]Step 1: Obtain the myoelectric signals and real-time angle data of the continuous movement of the knee joint of the lower limbs, specifically: collect the myoelectric signals of six muscles of the lower limbs of the human body through the DELSYS Trigno Wireless System myoelectric acquisition instrument, namely biceps femoris and quadriceps femoris Muscle, vastus lateralis, vastus medialis, semitendinosus, gracilis, and then perform bandpass filtering on them. At the same time, the real-time angle of the joint is collected through the Codamotion system. The specific experimental action is that 4 experimenters sit on a chair and complete 2, 4, and 6 flexion and extension actions within 10 seconds under the condition of weight-bearing and no weight-bearing respectively. The collected six EMG signals and real-time angles such as figure 2 shown.
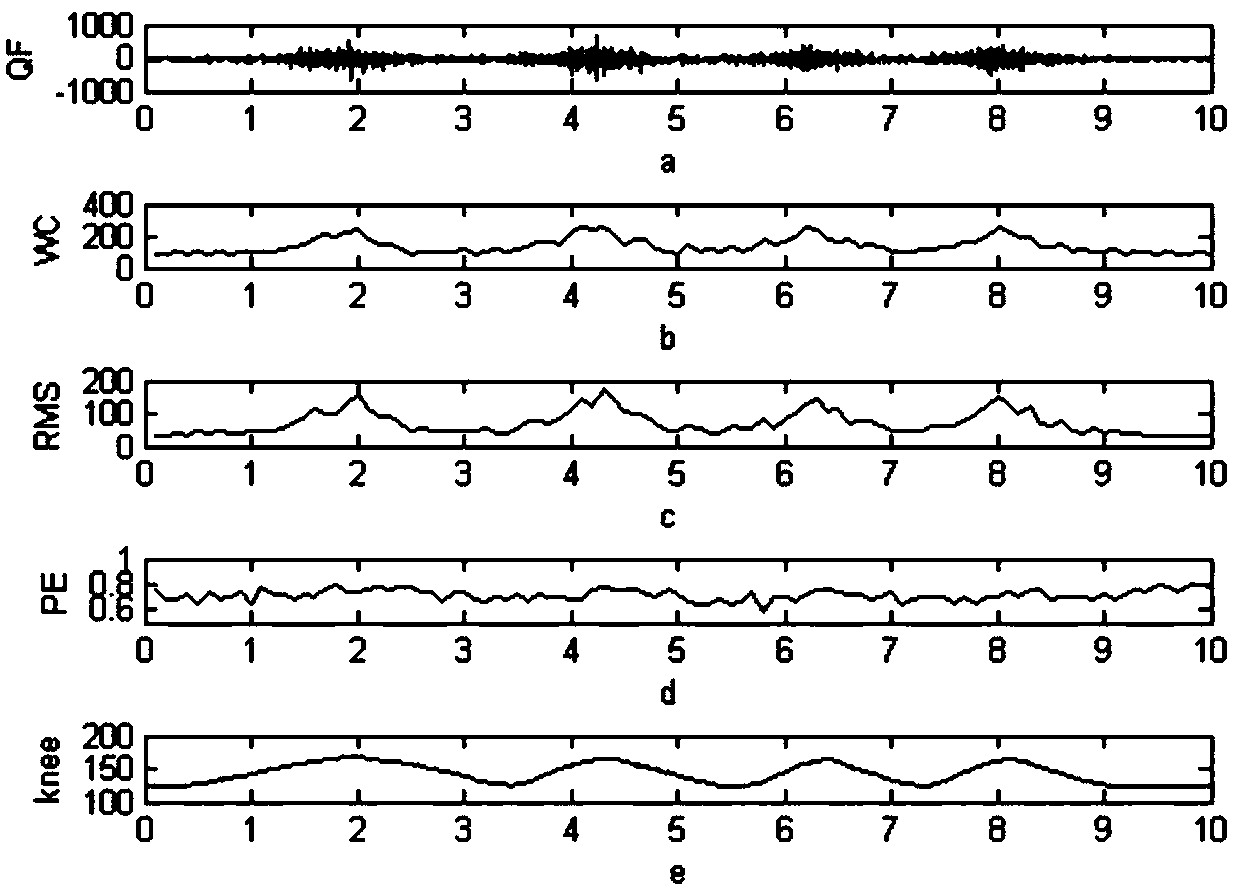
[0055] Step 2, perform feature extraction o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com