Finite time integral sliding mode terminal guidance law
A limited time, terminal guidance law technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of conservatism and difficulty in obtaining
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach
[0093] The invention proposes a finite-time-integral sliding-mode terminal guidance law based on a super-twisting algorithm, which mainly includes the establishment of three-dimensional guidance equations, the design of a target maneuver acceleration observer, the design of a finite-time-integral sliding-mode terminal guidance law and its stability analysis. The specific embodiment of the present invention is as follows:
[0094] 1) Assume that the missile uses an active radar seeker, which can provide target-missile relative distance information r and its rate of change Line of sight angle information φ and θ, and line of sight angle rate information and
[0095] 2) From the output information of the seeker, calculate the target-missile relative approach velocity component V r , V φ and V θ . Use this as the input of the target acceleration observers (10) and (11) to obtain the estimated value of the target maneuver acceleration and
[0096] 3) Substitute the es...
Embodiment 1
[0098] Intercept drones. The initial position of the interceptor missile is (100, 1, 15) km, the initial velocity is 1600m / s, and the initial trajectory inclination and trajectory angle are -15° and -17° respectively. The initial position of the target is (120, 5, 12) km, the initial velocity is 900m / s, and the initial ballistic inclination and ballistic deflection angle are -2° and 180° respectively. The target is only implemented on the yaw channel a Tθ =-8g, t≥3s form of step maneuver.
Embodiment 2
[0100]Intercept ballistic missiles. The initial position of the interceptor missile is (45, 1, 6) km, the initial velocity is 1700m / s, and the initial trajectory inclination and trajectory angle are 10.5° and -18.5° respectively. The initial position of the target is (75, 5, 20) km, the initial velocity is 900m / s, and the initial ballistic inclination and ballistic deflection angle are -40° and 180° respectively. Ballistic missile implements spiral maneuver, as a Tφ =Acos(πt / 3)g and a Tθ =Asin(πt / 3)g, where the amplitude A varies with the altitude, as shown in Table 1.
[0101] Table 1 Target Maneuvering Amplitude A
[0102]
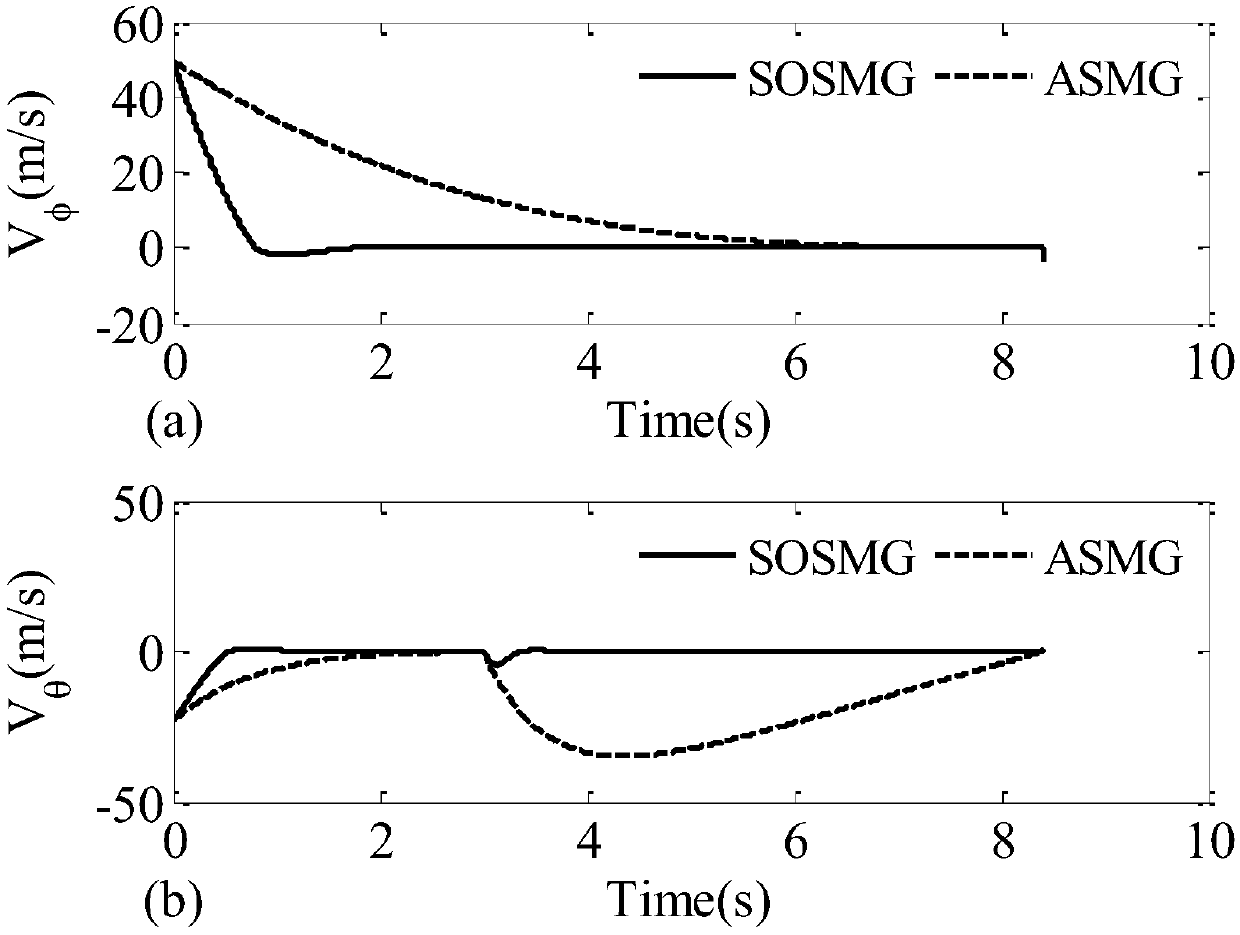
[0103] In the above two embodiments, the proposed finite-time integral sliding mode guidance law (SOSMG) based on the super-twisting algorithm is compared with the classic adaptive sliding mode guidance law (ASMG) to verify the performance of SOSMG.
[0104] from figure 1 with Figure 4 It can be seen that the proposed SOSMG can guarantee that t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com