Lower extremity exoskeleton heterogeneous knee joint based on parallel elastomer
A kind of elastic body and knee joint technology, which is applied in the direction of equipment to help people walk, passive exercise equipment, physical therapy, etc., can solve the problems of harming the comfort of human body movement, the occurrence of dead spots, etc., and improve the flexibility of joint movement , increase flexibility, increase the effect of bandwidth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
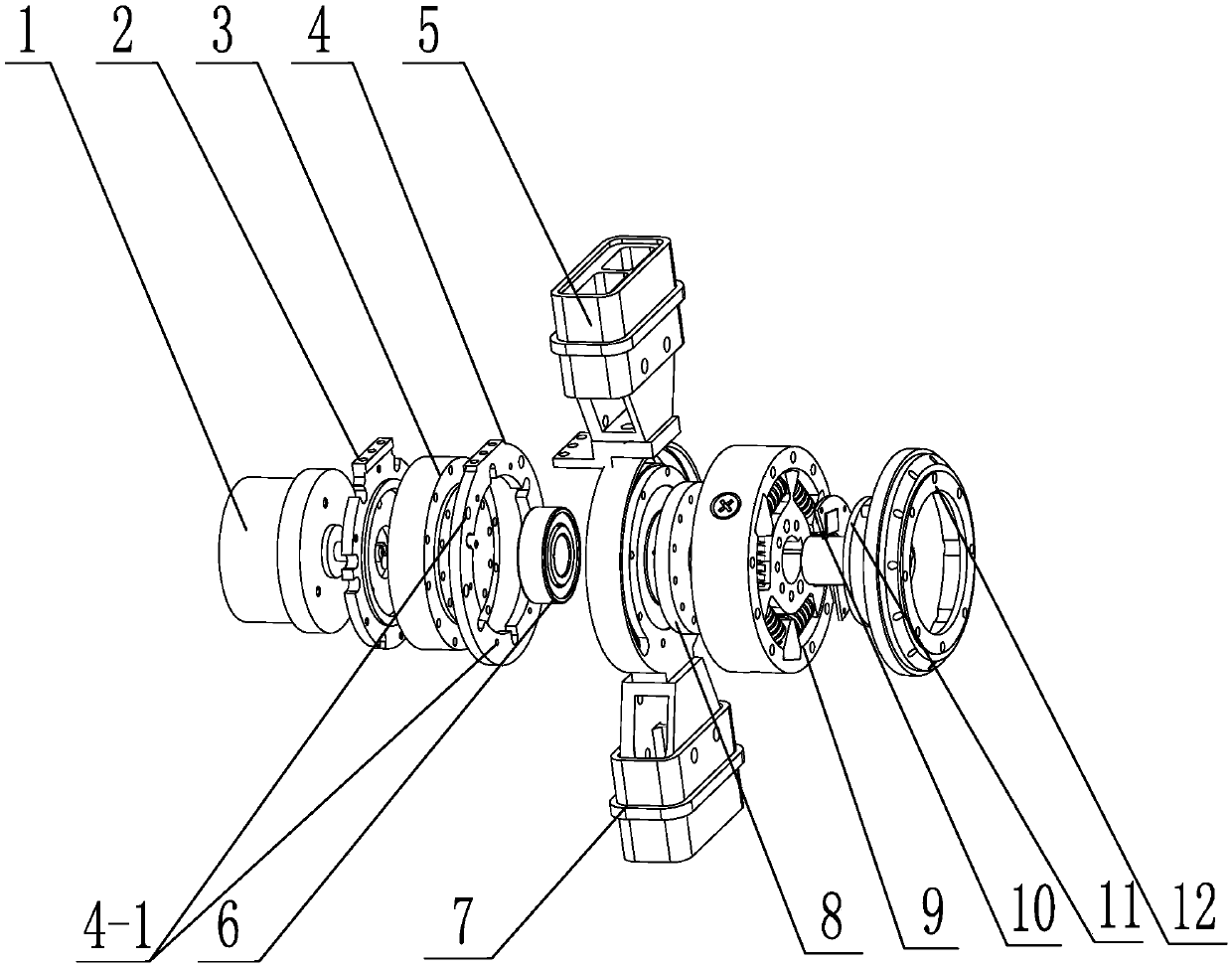
[0024] Specific implementation mode one: as Figure 1~5 As shown, the lower extremity exoskeleton heterogeneous knee joint based on parallel elastic body in this embodiment includes a motor 1, a fixed cover 2, a harmonic reducer 3, a connecting plate 4, a knee joint body, a thigh rod connecting piece 5, and a calf rod connecting piece. 7 and the reducer output shaft 8, the lower end of the thigh rod connector 5 is provided with an outer edge, the fixed cover 2 and the connecting plate 4 are arranged in parallel and fixed on the outer edge of the thigh rod connector 5, and the motor 1 is fixed on the fixed On one end of the cover 2, one end of the harmonic reducer 3 is fixed on the other end of the fixed cover 2, the other end of the harmonic reducer 3 is connected to the connecting plate 4, and the output shaft 8 of the reducer is fixed on the harmonic On the reducer 3, the knee joint body is installed on the output shaft 8 of the reducer through the deep groove ball bearing 6...
specific Embodiment approach 2
[0026] Specific implementation mode two: as Figure 4 As shown, the adjustable limit block 501 in this embodiment includes a rubber pad and two adjustment pieces. The rubber pad is located between the two adjustment pieces. on the slot. In such a design, when the adjustable limit block 501 needs to be adjusted, the bolts and nuts are loosened and the adjustable limit block 501 is slid to a desired position, and then locked to limit the position. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0027] Specific implementation mode three: as figure 1 and figure 2 As shown, the parallel elastic body 9 of this embodiment includes an elastic outer ring 901, an elastic inner ring 903, six pairs of rectangular springs 902, three pairs of triangular blocks 905 and six pairs of elastic positioning pins 906. There are three dovetail blocks for uniform processing, and three pairs of triangular blocks 905 are evenly distributed in the circumferential direction on the inner wall of the elastic outer ring 901, and each pair of triangular blocks 905 is arranged side by side. One end of the spring 902 is in contact with a pair of triangular blocks 905 , the other end of each pair of rectangular springs 902 is in contact with a corresponding dovetail block, and each rectangular spring 902 is positioned by an elastic positioning pin 906 . In this design, the parallel elastic body 9 uses the compression deformation of the rectangular spring to realize the relative rotation of the inn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com