Brain-imitating navigation method based on optical flow UWB combination
A navigation method and optical flow technology, applied in navigation computing tools and other directions, can solve the problems of insufficient intelligence of navigation and positioning technology, the accuracy of pure inertial navigation system cannot meet the long-term requirements of intelligent vehicles, and satellite navigation signals are easily interfered. Achieve the effect of increasing autonomy, increasing intelligence, and increasing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0032] A brain-like navigation method based on optical flow UWB combination, including the following steps:
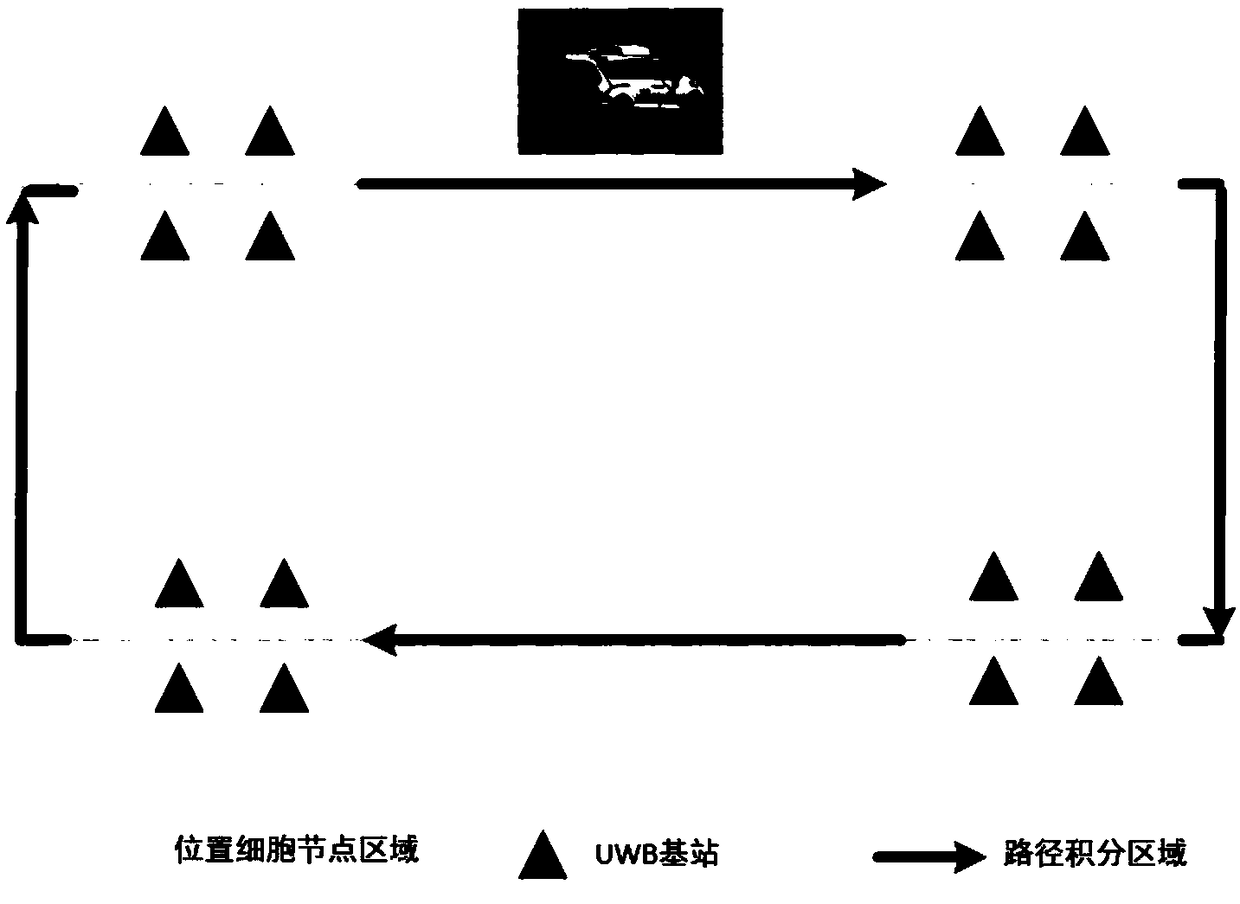
[0033] Step 1: If figure 1 As shown, the motion area of the intelligent vehicle is divided into a path integration area and a location cell node area. UWB ultra-wideband positioning system.
[0034] Among them, the construction method of the location cell node area is as follows: in the movement area of the intelligent vehicle, set a fixed distance at intervals, and set a location cell node at every fixed distance. No overlap between cell node areas is the minimum standard; four UWB base stations are arranged at each cell node, and the absolute geographic location of each UWB base station is measured by high-precision differential GPS and stored in each UWB base station; the four UWB base stations The perceived area is the place ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com