Accurate control method for path tracking of unmanned ship based on dual guidance of speed and heading
A technology of path tracking and control methods, applied in adaptive control, general control systems, control/regulation systems, etc., can solve the problems of reducing the accuracy of path tracking control systems, fast and accurate disturbance estimation and compensation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
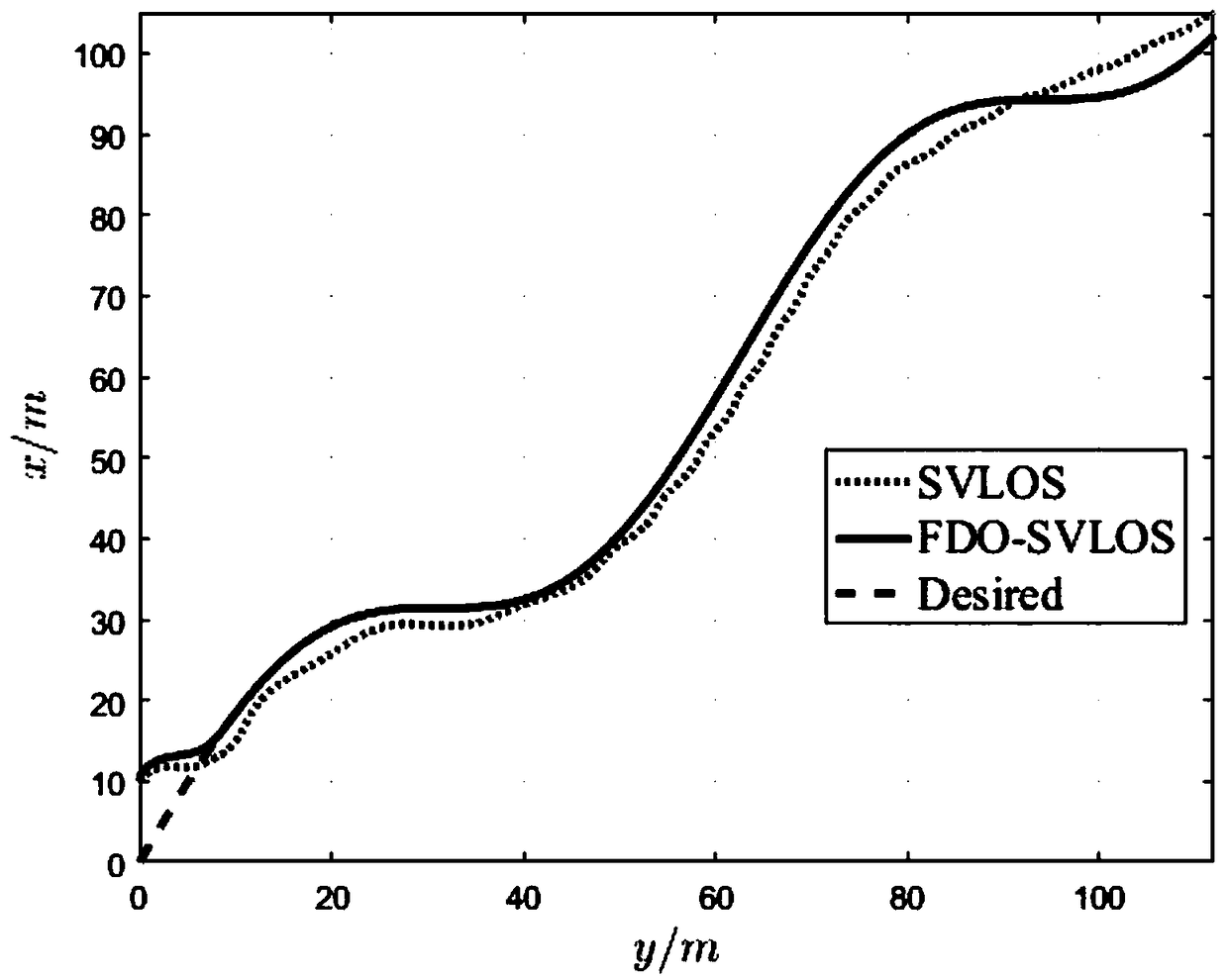
[0088] In order to illustrate the effectiveness of the method, the simulation is carried out on the CybershipI unmanned ship model, and the control method (abbreviation: FDO-SVLOS) proposed by the present invention is compared with the algorithm (abbreviation: SVLOS) without the finite time disturbance observer, with Further explain the observation effect of the finite-time disturbance observer. The parameters of the unmanned ship model are:
[0089] m 11 =19kg,m 22 =35.2kg,m 33 =4.2kg,d 11 =4kg / s,d 22 =1kg / s,d 33 = 10 kg / s.
[0090] The complex unknown interference assumptions are as follows:
[0091] τ δ =[sin(t+0.3π),cos(t+0.1π),sin(t+0.2π)] T
[0092] The initial state of the unmanned ship is set as:
[0093] [x,y,ψ]=[10,0,0], [u,v,r]=[0,0,0],
[0094] The reference path is set as follows:
[0095]
[0096] The setting parameters in the algorithm are chosen as:
[0097] k 1 = 1,k 2 =1,Δ=1.2,L=diag(400,400,400),λ 1 =0.2,λ 2 =0.01,k u =1.2,k ψ =1.2,k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com