Unmanned aerial vehicle intelligent spraying system and method based on prescription map
A technology of drones and prescription maps, applied in the field of low-altitude remote sensing images, can solve problems such as high labor costs, easy crashes, unfavorable promotion of drone plant protection operations, etc., and achieve the effect of improving work efficiency and liberating productivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
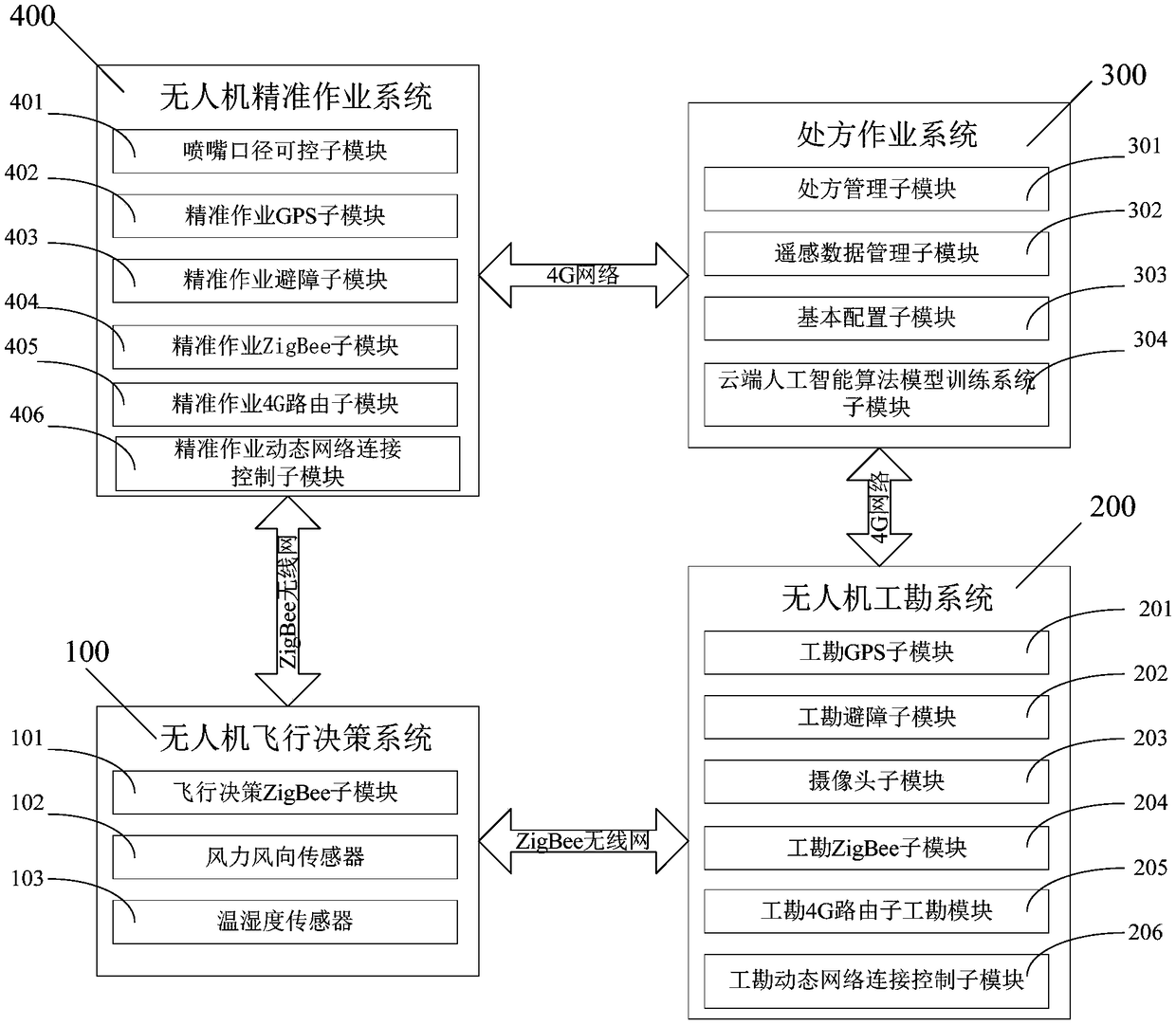
[0054] Such as figure 1 As shown, in this embodiment, a UAV intelligent spraying system based on a prescription map includes a UAV flight decision-making system 100, a UAV survey system 200, an operation prescription system 300, and a UAV precision operation system 400; The UAV flight decision-making system 100 communicates with the UAV precision operation system 400 through a ZigBee wireless sensor network, and the UAV precision operation system 400 communicates with the operation prescription system 300 through a 4G network. The job prescription system 300 communicates with the UAV site survey system 200 through the 4G network; the drone site survey system 200 communicates with the UAV flight decision system 100 through the ZigBee wireless sensor network;
[0055] The UAV flight decision-making system 100 is used to collect environmental information and make decisions for whether the UAV precision operation system and the UAV site survey system work or site survey; the UAV f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com