Integral separation type PI-Type tight format model free adaptive course control algorithm used for ships
A model-free self-adaptive, integral separation technology, applied in two-dimensional position/channel control, electric controller, non-electric variable control, etc., can solve the problems of ship course overshoot, oscillation system, instability, etc., to achieve Reduce the adjustment time, improve the response speed, and avoid the effect of system shock or even instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with accompanying drawing:
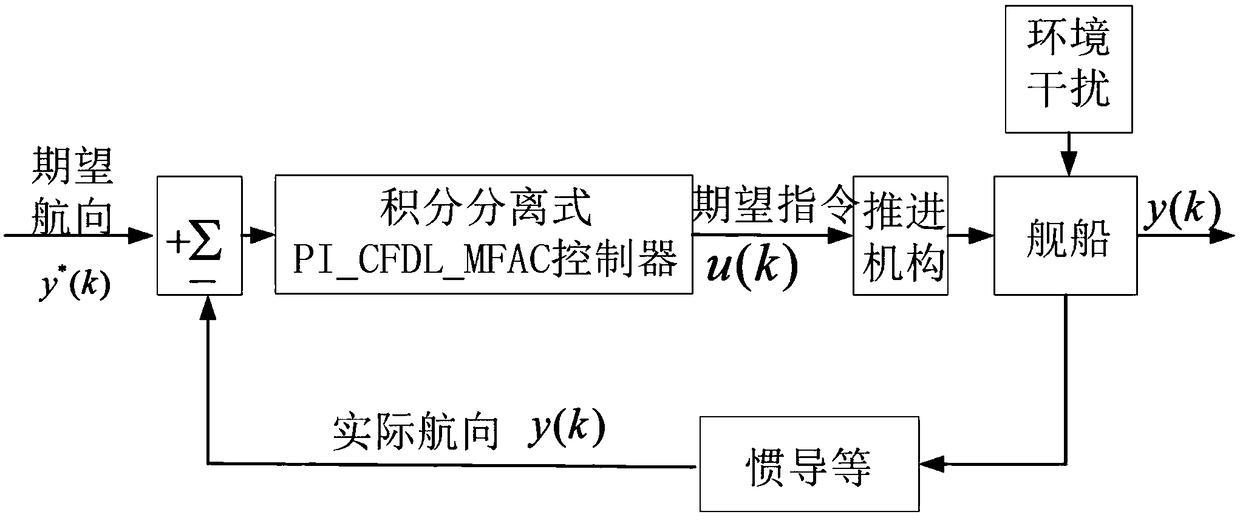
[0022] figure 1 Be the heading system model of the present invention, first give the desired heading y(k) * command, calculate the heading deviation e(k) according to the actual heading of the ship at the current moment, and use it as the negative feedback input of the integral-separated PI_CFDL_MFAC controller, and the integral-separated PI_CFDL_MFAC controller calculates the current expected input value u(k) of the ship heading system . The control mechanism executes the expected input command, updates the actual heading of the ship system, and sets k=k+1 to update the heading deviation e(k) to enter the negative feedback loop again, so that the actual heading of the ship converges to the desired heading.
[0023] figure 2 It is a system flowchart of the present invention, and the specific implementation steps are as follows:
[0024] Step 1. On the basis of compact ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com