Four-rotor aircraft nonlinear sliding mode position and attitude control method based on single exponential function
A technology of a quadrotor aircraft and a control method, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve the problems of long flight distance and time, poor operability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The present invention will be further described below in conjunction with the accompanying drawings.
[0084] refer to Figure 1-Figure 5 , a nonlinear sliding mode pose control method for a quadrotor aircraft based on a single exponential function, comprising the following steps:
[0085] Step 1, establish the dynamic model of the quadrotor UAV system, initialize the system state, sampling time and control parameters, the process is as follows:
[0086] 1.1 The expression form of the dynamic model of the quadrotor UAV system is:
[0087]
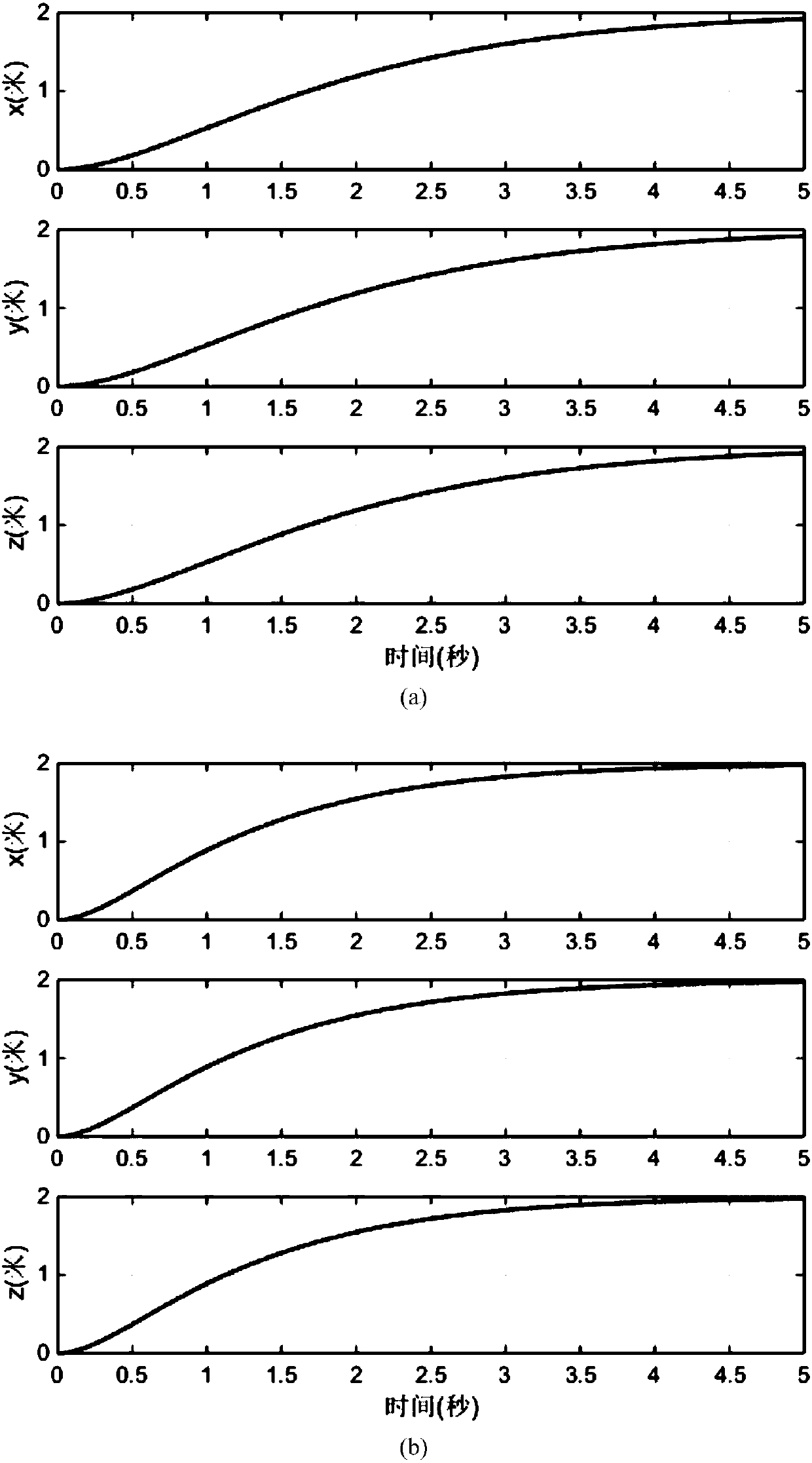
[0088] Among them, x, y, and z represent the positions of the three coordinate axes of the UAV in the inertial coordinate system, m represents the mass of the UAV, and F represents the total external force acting on the UAV, including the gravity of the UAV The resultant force U generated by mg and the four rotors F , T is the transfer matrix from the body coordinate system to the inertial coordinate system, expressed as:
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com