Tactile feedback exoskeleton device based on vibration and pneumatic combination
A technology of tactile feedback and exoskeleton, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of no tactile feedback, no simulated tactile experience, etc., and achieve the effect of easy portability, real touch and portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
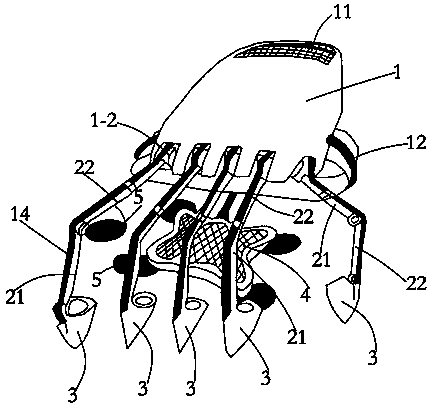
[0032] In order to solve the problem of no tactile feedback and no simulated tactile experience in existing VR technical equipment, this embodiment provides a method such as figure 1 The shown tactile feedback exoskeleton device based on the combination of vibration and pneumatics includes a simulated palm 1 set on the back of the human hand, five simulated fingers 2 set on the five fingers of the human body, and five simulated fingers 2 are set on the simulated palm 1 for fixing the rudder. The card slot of the steering gear 1-2, and the roots of the five simulated fingers 2 are respectively connected to the steering gear 1-2 through the transmission shaft;
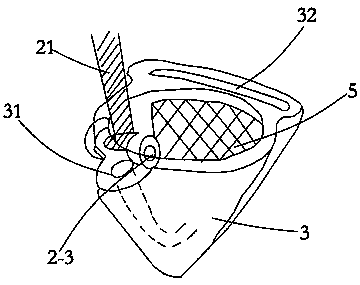
[0033] The simulated finger 2 of the present embodiment has 15 degrees of freedom, wherein: the knuckles of the five simulated fingers 2 have one degree of freedom respectively, and the fingertips of the five simulated fingers 2 are respectively movably connected with a fingertip 3, the fingertip 3 is set on the fingers ...
Embodiment 2
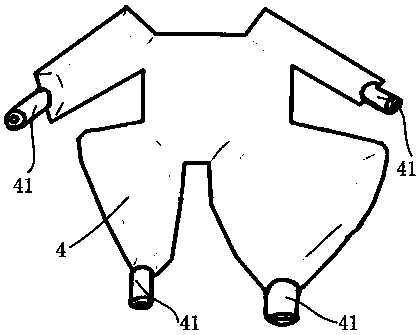
[0052] The difference from the above embodiment is that the simulated finger 2 of this embodiment has 16 degrees of freedom. Among them, the thumb, index finger, middle finger, ring finger, and little finger of the simulated finger 2 each have a degree of freedom, and the metacarpal bone has a degree of freedom.
[0053] Wherein, the thumb, forefinger, middle finger, ring finger, and little finger can be made up of fingertip section 21, middle section and finger root section 22 respectively, and one end of fingertip section 21 is connected flexibly with finger cot 3, and the other end of fingertip section 21 is connected with the middle section. One end of the section is fixedly connected, and the other end of the middle section is movably connected with one end of the root section 22, and the other end of the root section 22 is movably connected with the steering gear 1-2 through a transmission shaft, so that the fingers have five degrees of freedom.
[0054] The simulated fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com