Cylindrical coordinate and rectangular coordinate combined archwire bending robot and using method thereof
A Cartesian coordinate and robot technology, applied in medical science, dentistry, orthodontics, etc., can solve the problems of robot interference in orthodontic arch wire bending, reduce the quality of orthodontic arch wire, hinder the bending process, etc., and achieve a reduction in bending The effect of reducing the difficulty of planning, improving the accuracy of arch wire bending, and reducing the difficulty of control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
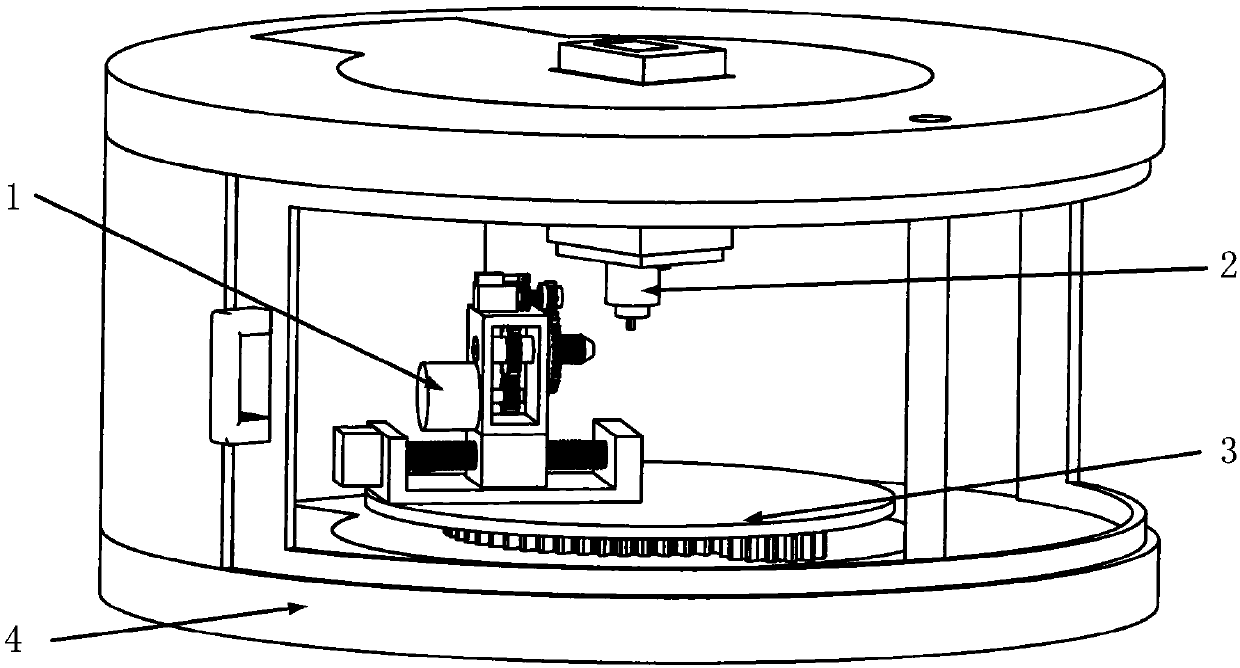
[0029] Embodiment 1: as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , Figure 8 As shown, this embodiment adopts the following technical solutions:
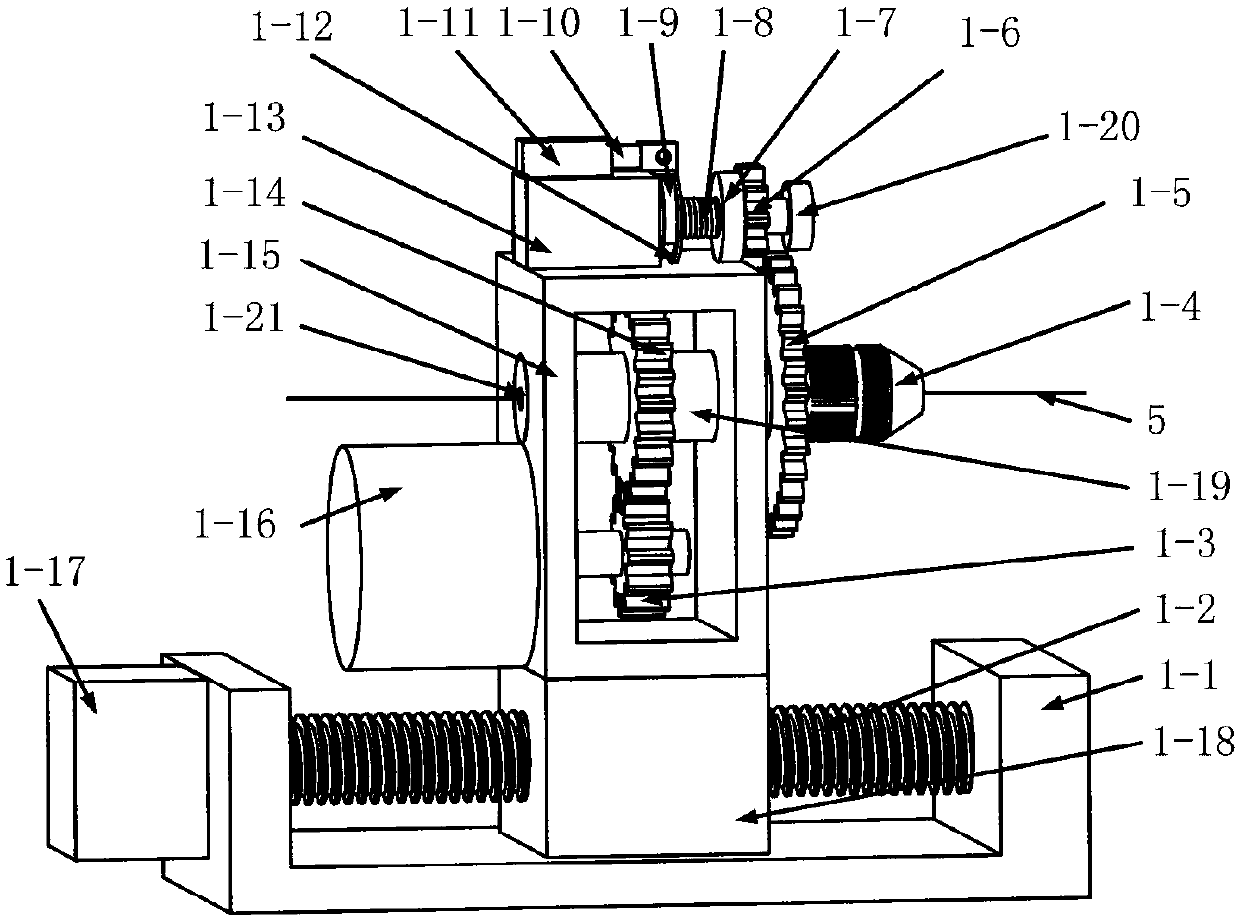
[0030] The arch wire bending robot combined with cylindrical coordinates and rectangular coordinates and its use method is composed of four parts: clamp I1, clamp II2, cylindrical coordinate system turntable 3, and robot main body shell 4: clamp I in clamp I1 The lead screw guide rail slide table 1-1 is connected to the turntable 3-3 in the cylindrical coordinate system turntable 3 through bolts, and the turntable 3-3 of the cylindrical coordinate system turntable 3 is connected to the connection chassis 4-6 inside the robot main body shell 4 through bolts. Connection, clamp II 2 is fixed on the top 4-7 of the outer shell of the robot main body shell 4 through bolt connection; the clamp I1 belongs to the cylindrical coordinate type, and it includes: clamp I lead screw guide rail slide 1-...
Embodiment 2
[0036] Embodiment 2: Define the initial power-on position of the orthodontic archwire bending robot;
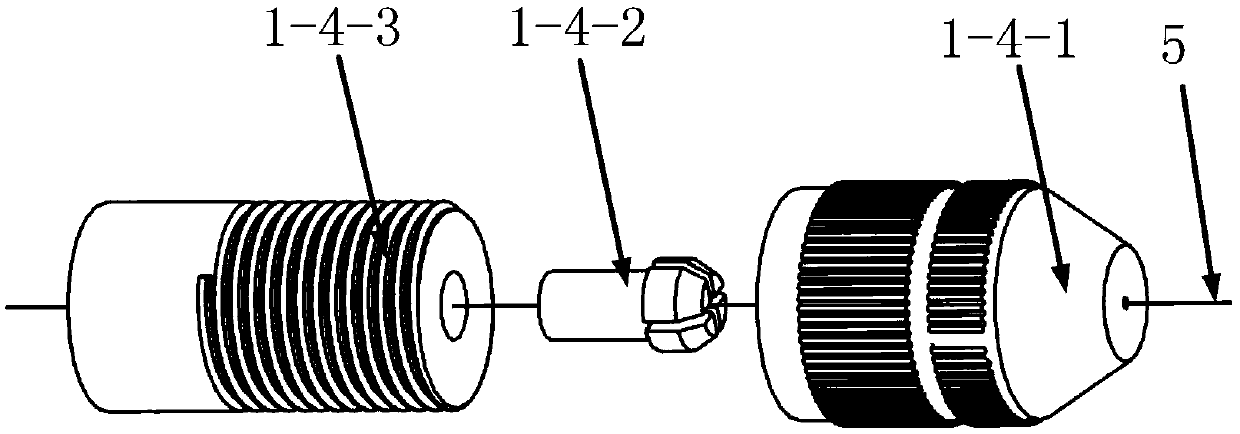
[0037] According to the device described in Embodiment 1, when the orthodontic archwire bending robot is in the initial power-on state, the clamp I linear motor push rod 1-11 in the clamp I1 is in the initial state of not being pushed out, and the clamp I clamps the motor 1-13. Clamp I rotary motor 1-16 and clamp I lead screw motor 1-17 are in the standby state, and the distance between clamp I lead screw nut 1-18 and clamp I lead screw motor 1-17 is the clamp Ⅰ The initial position of the screw nut 1-18, the pincer Ⅰ clamps the driven gear 1-5 and the pincer Ⅰ clamps the driving gear 1-6 is in a non-meshing state, and the pincer I clamps the chuck core in the tapered chuck 1-4 1-4-2 is in the non-clamping state; the linear motor 2-5 in the clamp II 2, the screw motor 2-9 in the clamp II and the rotary motor 2-12 in the clamp II are all in the standby state, and the screw nut...
Embodiment 3
[0038] Embodiment 3: The specific implementation of the orthodontic archwire robot to complete the automatic wire feeding task;
[0039] According to the device described in Example 1, when the dental wire bending technician needs the orthodontic archwire robot to complete the automatic wire feeding task, the specific implementation method is: before the wire feeding task is performed, the orthodontic archwire robot is in the initial power-on state, The clamp I linear motor push rod 1-11 in the clamp I1 is still in the initial state that has not been pushed out, the clamp I clamping motor 1-13, and the clamp I rotating motor 1-16 are still in the initial state and remain in the standby state, and the clamp I clamps The passive gear 1-5 is in a non-meshing state with the active gear 1-6 clamped by pliers Ⅰ, and the clamp core 1-4-2 in the tapered chuck 1-4 of pliers Ⅰ is in a non-clamping state. When dental wire bending The technician sends the orthodontic archwire 5 from the w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com