Wearable flexible lower limb exoskeleton based on negative pressure rotation pneumatic artificial muscle
A technology of pneumatic artificial muscle and exoskeleton, which is applied in the direction of appliances that help people walk, manufacturing tools, and passive exercise equipment. It can solve problems such as high working pressure, blasting, and hysteresis, and achieve improved drive efficiency and high power density , Improve the effect of safety and comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described below in conjunction with the accompanying drawings and specific examples of implementation, but not as a limitation of the present invention.
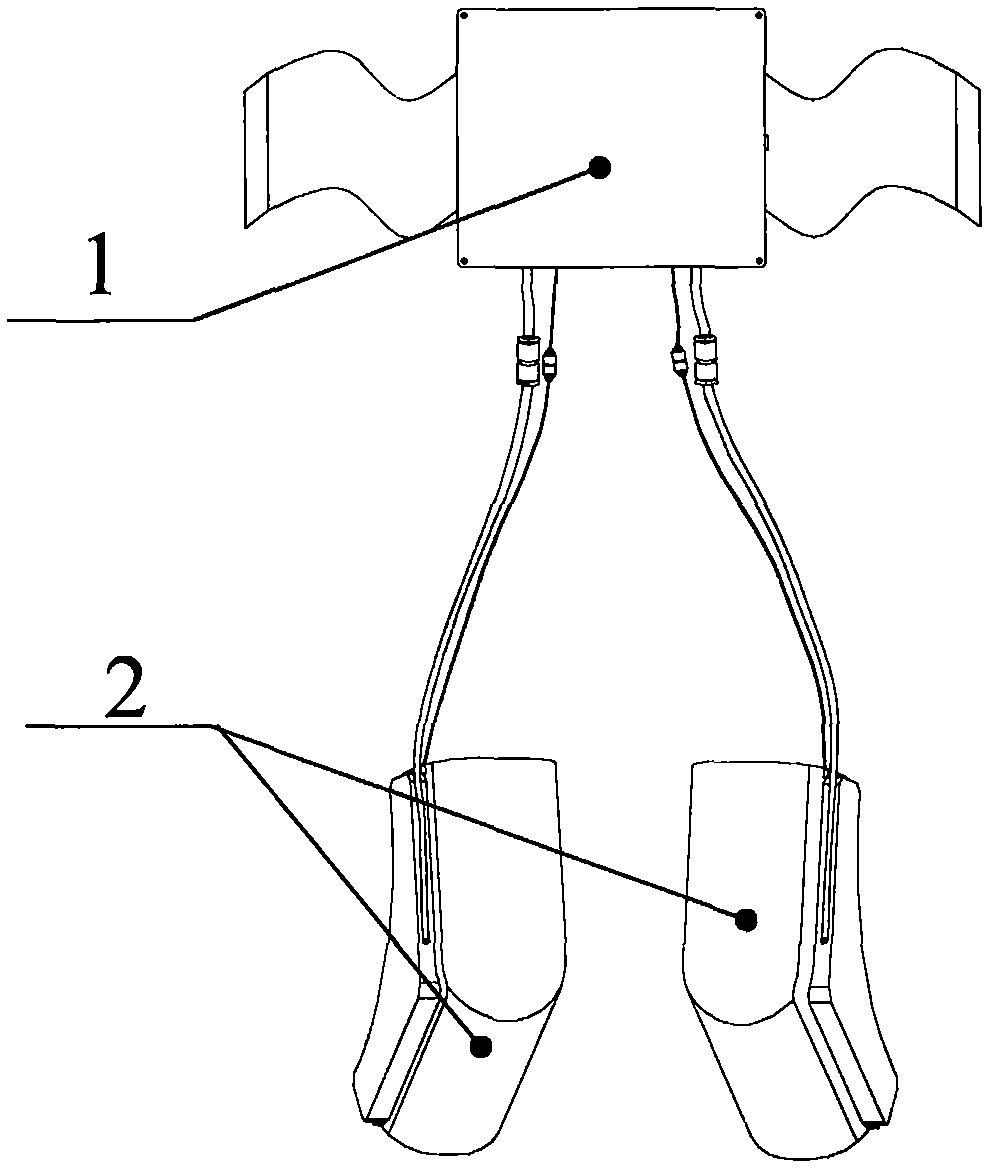
[0053] like figure 1 As shown, a wearable flexible lower extremity exoskeleton based on negative pressure rotating pneumatic artificial muscles is mainly composed of a portable control and power system 1 and a wearable flexible power assist system 2 . The portable control and power system 1 is the data processing, control and power output components of the wearable flexible power assist system 2; The booster components are respectively worn on the corresponding parts of the thigh, calf and knee joint of the user's left and right legs, and provide the user with torque to assist the swing of the calf relative to the thigh.
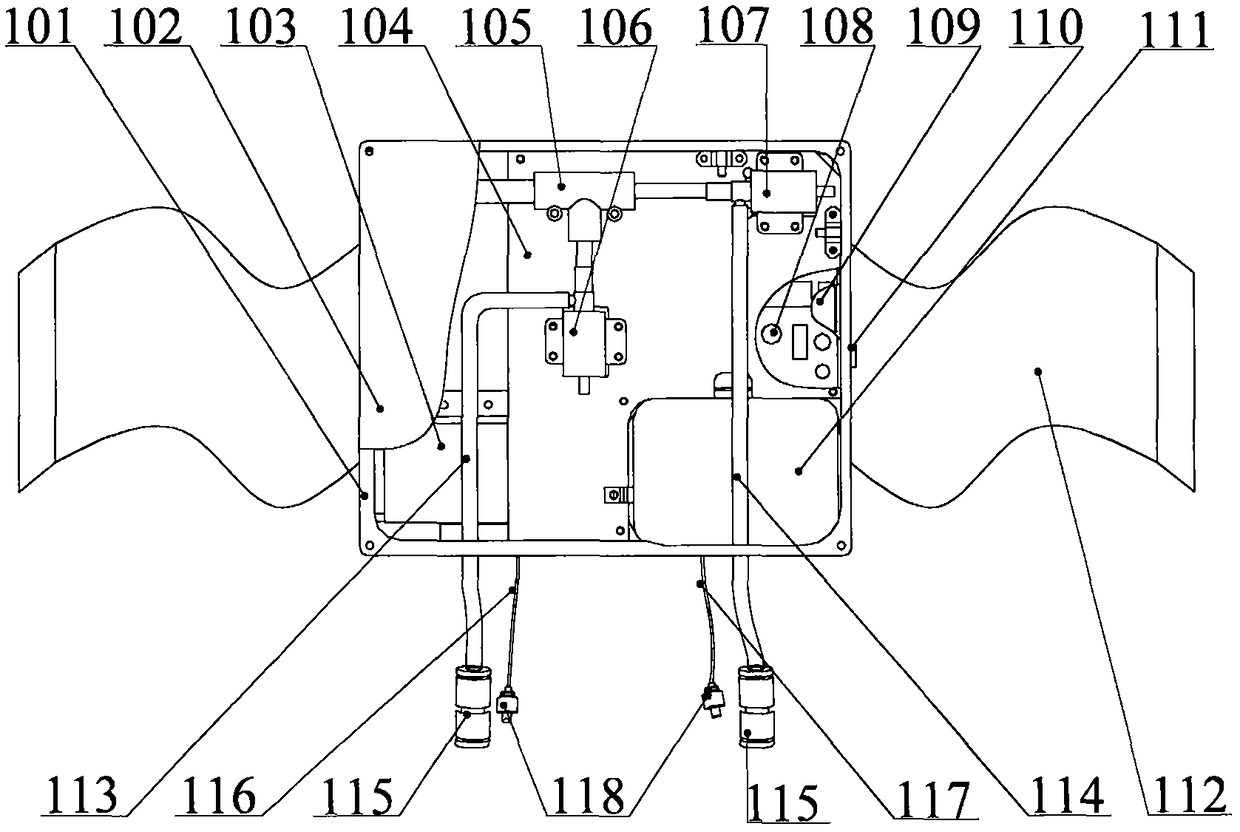
[0054] like figure 2 As shown, the portable control and power system mainly includes a controller body 101, an upper cover 102, a miniature negative pressure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com