Kneeless underactuated bionic biped walking machine with auxiliary side swing mechanism
A pendulum mechanism and auxiliary side technology, applied in the field of mechanical bionics, can solve the problems of poor terrain adaptability, unnatural walking, complex mechanism structure, etc., and achieve the effect of avoiding wiping the ground and having a simple and compact structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
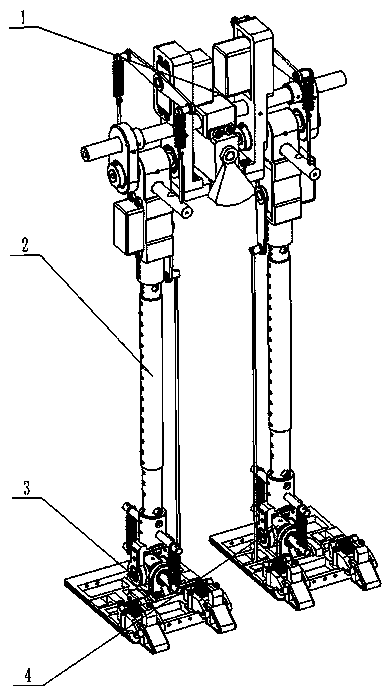
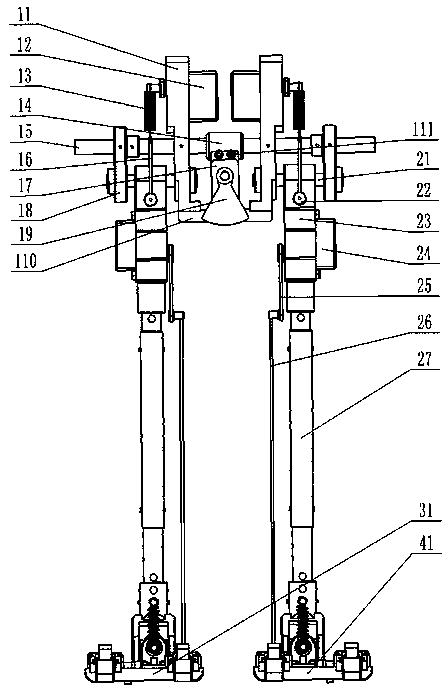
[0021] see figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 As shown, the present embodiment includes a hip assembly 1, a leg assembly 2, a right foot assembly 3, and a left foot assembly 4.
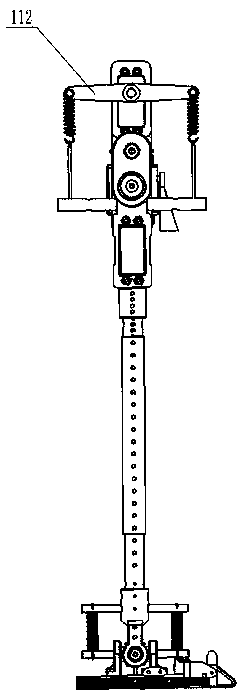
[0022] The hip assembly 1 includes a first frame 11, a first steering gear 12, a first extension spring 13, a second frame 14, a third frame 15, a first flexible connector 16, a second steering gear 17. The fourth frame 18, the eccentric wheel 19, the fifth frame 110, the hexagon socket head cap screws 111, and the first rudder arm 112. Such as figure 1 As shown, wherein, the second frame 14 is fixedly connected to the middle of the third frame 15 , and the symmetrically distributed first frame 11 and the fourth frame 18 are also fixedly connected to both sides of the third frame 15 . The fifth frame 110 is fixed on the lower ends of the two first frames 11, so that the overall structure of the hip assembly 1 is more stable. The first steering gear 12 used in pairs is sym...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com