Screening method for autonomous landing candidate area of unmanned aerial vehicles in complex scenes without preset targets
A technology for complex scenes and candidate areas, applied in scene recognition, computer parts, instruments, etc., can solve problems such as not being widely popularized and reducing the flexibility of autonomous landing of UAVs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
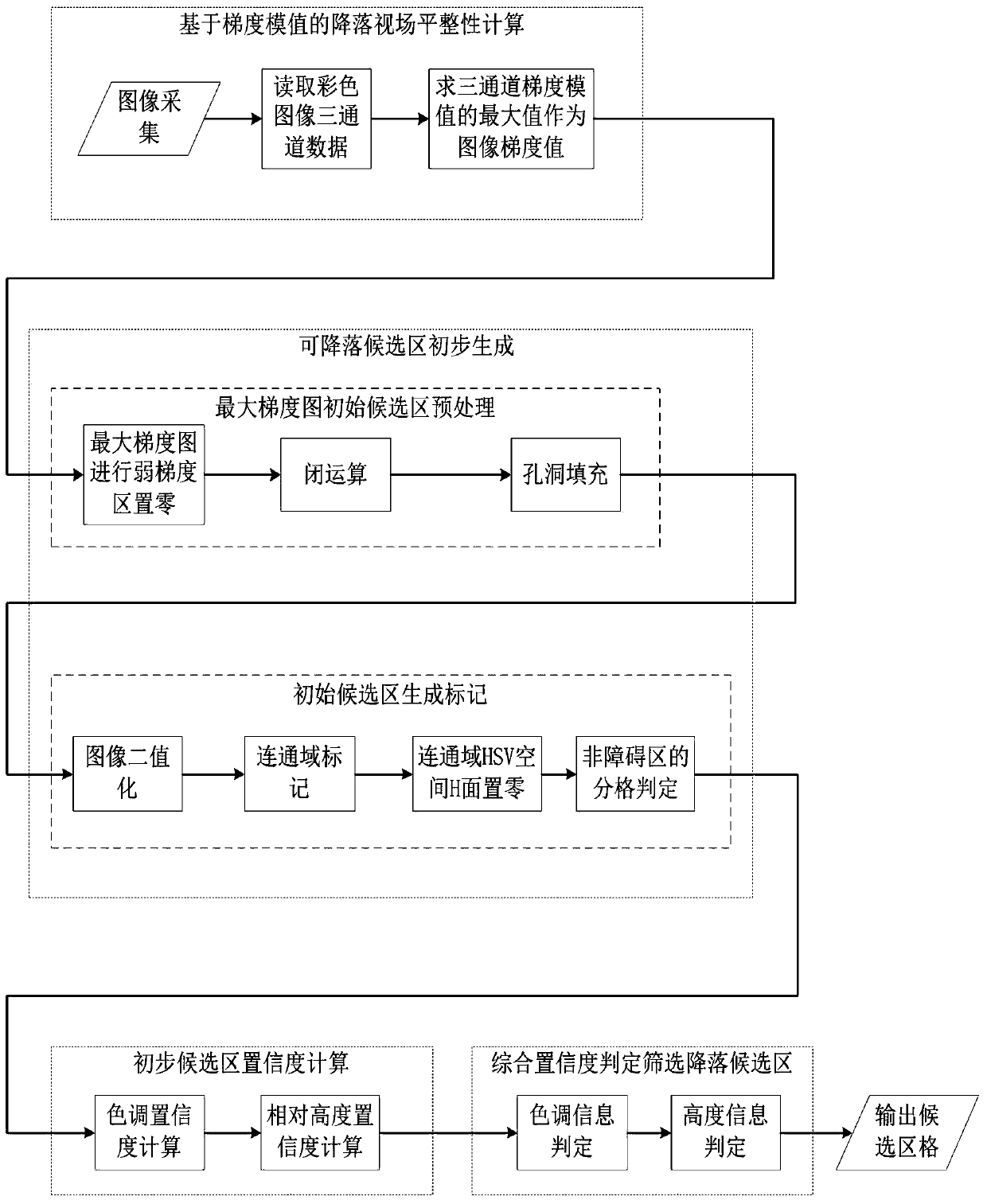
[0036] figure 1 It is a flow chart of a method for screening candidate areas for autonomous landing of UAVs in complex scenes without preset targets according to an embodiment of the present invention. According to an embodiment of the present invention, the screening method for autonomous landing candidate areas of unmanned aerial vehicles in complex scenes without preset targets includes:
[0037] A) Calculation of flatness of landing field of view based on gradient modulus, including:
[0038] A1) Image collection, including when the UAV is above the landing area, use the onboard camera to collect images or video equipment to collect continuous frame images;
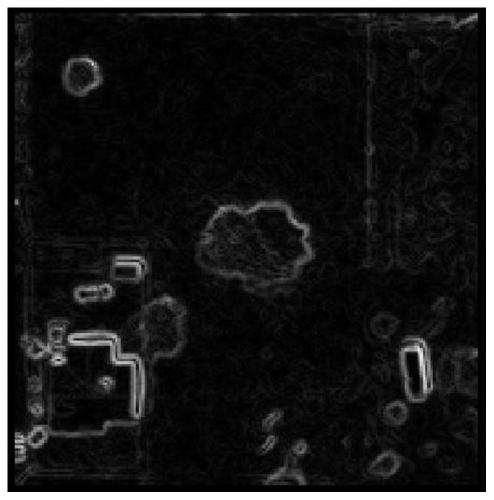
[0039] A2) Calculate the flatness of the landing field of view, read in the color image data img, and read the RGB three-channel data img_1, img_2, img_3 respectively, calculate the gradient modulus mod_1, mod_2, mod_3 of the RGB three-channel data pixel by pixel, and take img Each pixel position corresponds to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com