Variable-speed tilt momentum wheel precession control method based on variable-parameter nutation damping
A momentum wheel and variable parameter technology, applied in non-electric variable control, attitude control, control/adjustment system, etc., can solve the problems of stability and control precision reduction, so as to improve stability, realize precise tracking and improve control precision Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
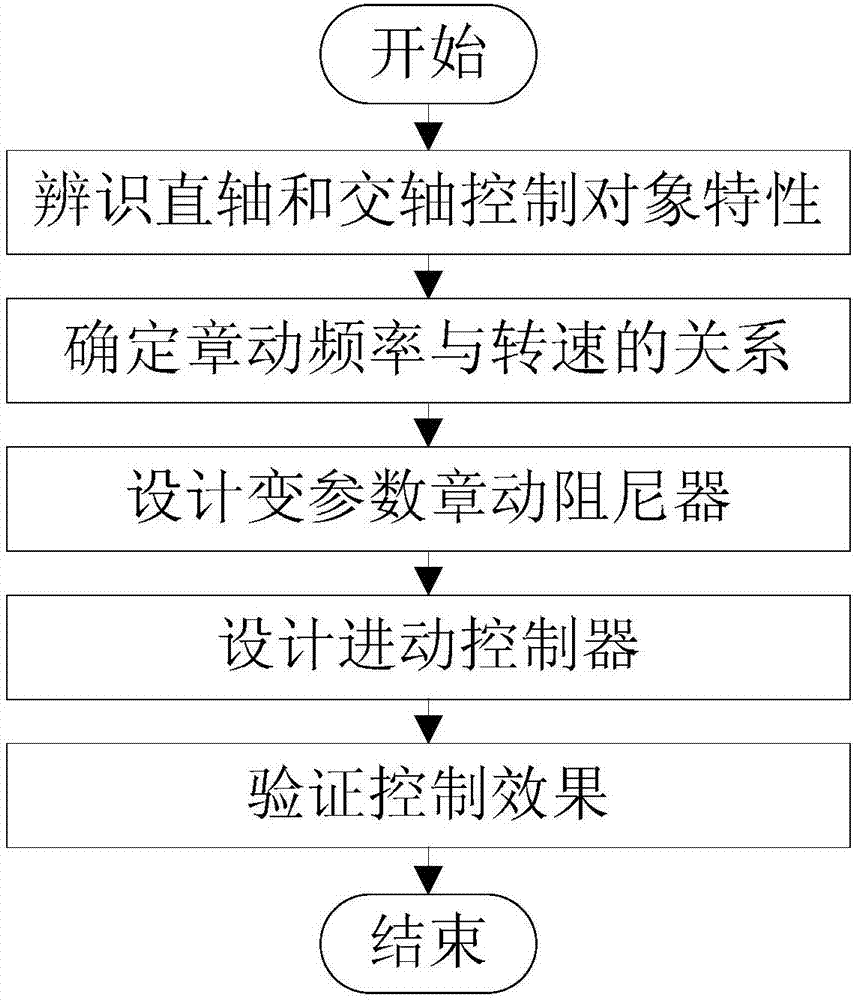
[0044] Specific implementation methods: such as Figures 1 to 5 by Figure 6a , Figure 6b As shown, this embodiment provides the implementation process of the variable speed tilting momentum wheel precession control method based on variable parameter nutation damping:
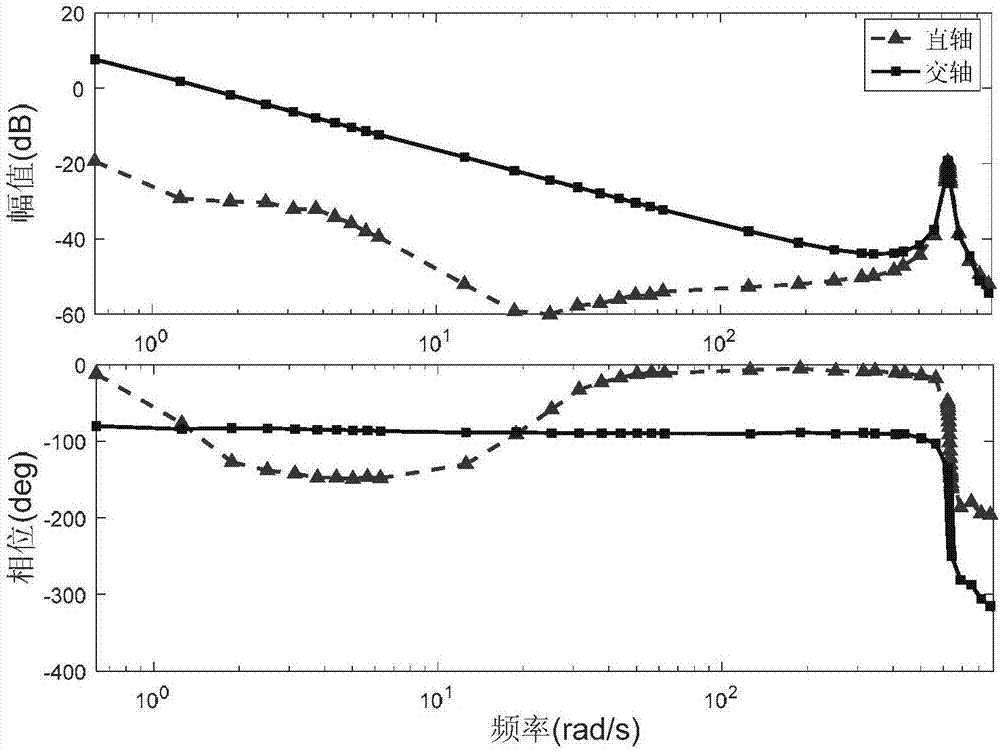
[0045] Step 1. Through the open-loop experiment of the tilting circuit, respectively identify the frequency characteristics of the direct-axis and quadrature-axis control objects of the variable-speed tilting momentum wheel at a certain speed;
[0046] (a) Let the variable-speed tilting momentum wheel run stably at a certain speed. Under the open-loop condition of the tilting control loop, apply m groups of sinusoidal voltages of different frequencies to the x-axis torquer of the variable-speed tilting momentum wheel, and apply zero voltage to the y-axis torquer, and measure The steady-state response of the output roll angle of the variable-speed roll momentum wheel on the x-axis (direct axis) and y-axis (ort...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com