PD-SMC control method of visual servo system based on eye-on-hand structure
A PD-SMC and visual servo technology, applied in the field of visual servo system, can solve the problems of difficult degrees of freedom and low real-time control, and achieve the effects of optimizing motion trajectory, ensuring stability, and alleviating system uncertainty.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
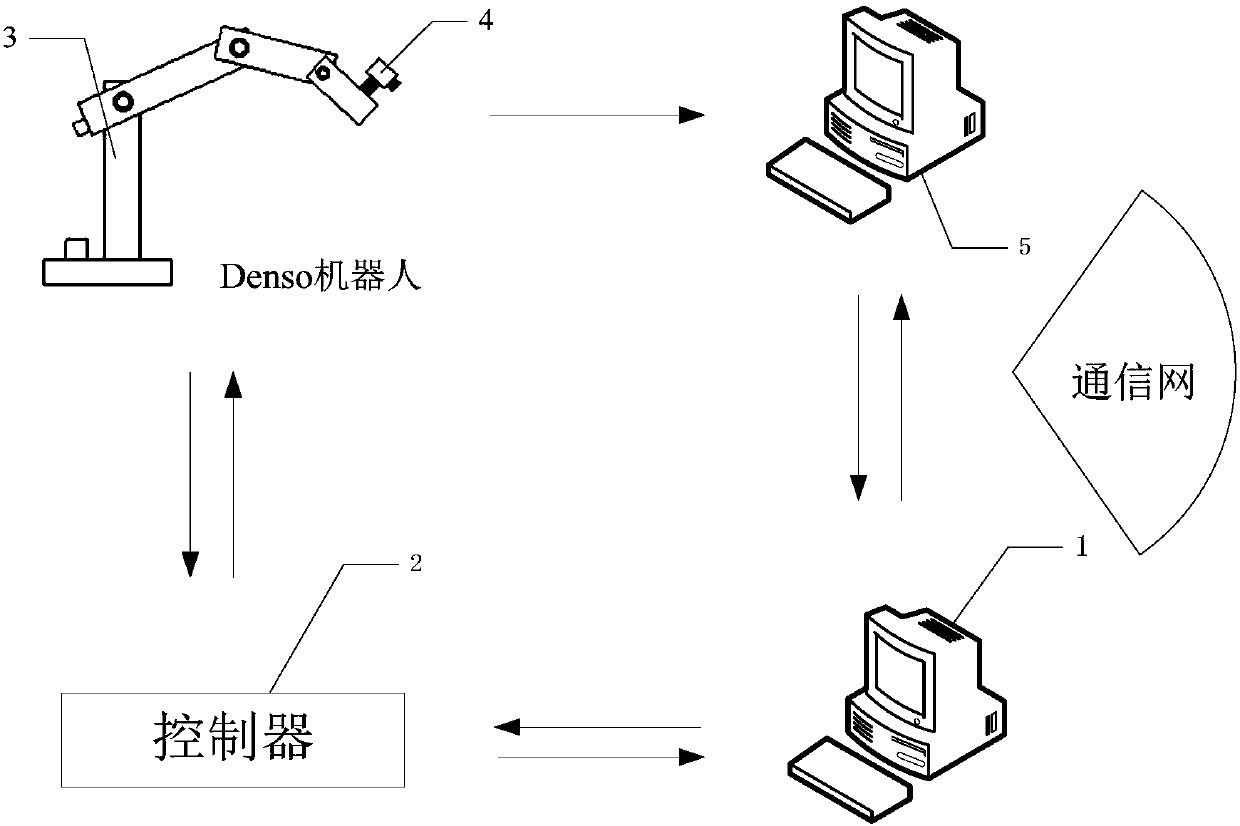
[0038] Specific Embodiment 1: Combining Figure 1 to Figure 7 Describe the implementation mode, a PD-SMC control method implemented on the visual servo system based on the eye-on-hand structure, the applied visual servo system structure based on the eye-on-hand structure is as follows figure 1 As shown, it includes a visual servo control part and a joint control part; the visual servo control part includes a video camera, a first computer and a second computer; the joint control part includes a controller and a six-degree-of-freedom mechanical arm (Denso robot), and a video camera Installed at the end of the six-degree-of-freedom mechanical arm; the first computer is connected to the six-degree-of-freedom mechanical arm through the controller, and transmits the command to the second computer through the communication network, and the second computer is connected to the six-degree-of-freedom mechanical arm and obtains image data, and then The image data is passed back to the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com