Matlab based simulation control method for nonlinear backstepping controller
A control method and nonlinear equation technology, applied in the field of simulation control of nonlinear backstep controller, can solve the problem of lack of simulation control method of nonlinear backstep controller, and achieve good dynamic tracking performance, good stability and high performance. Performance of position tracking capability, effect of high position tracking capability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
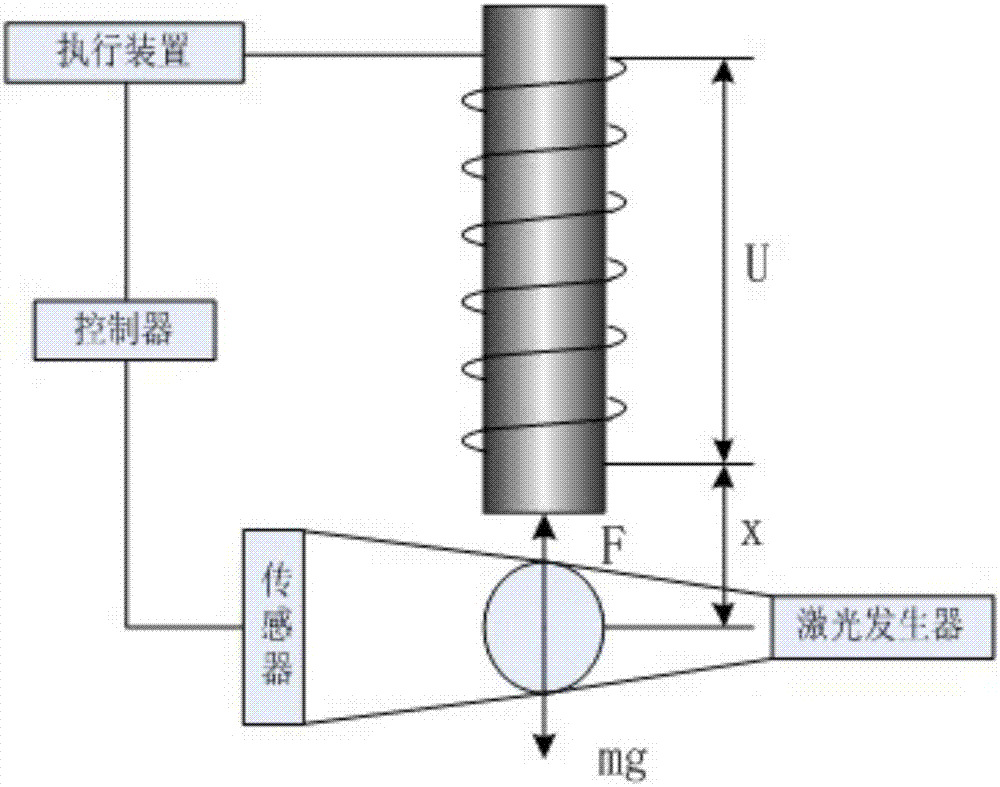
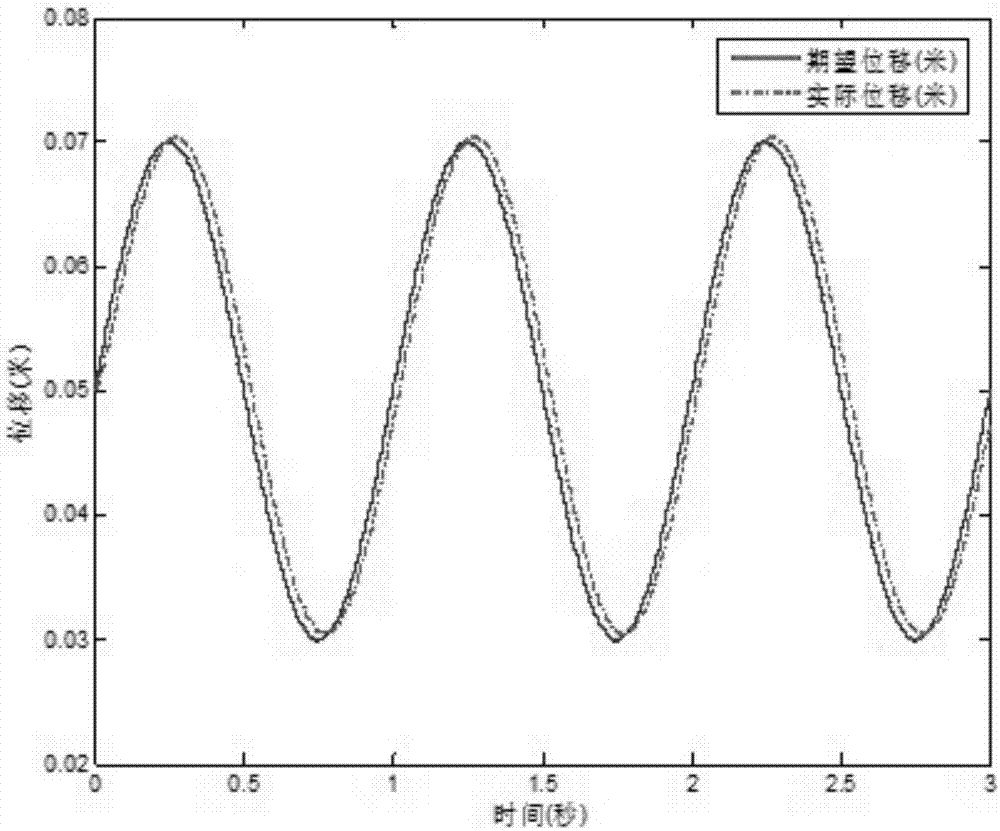
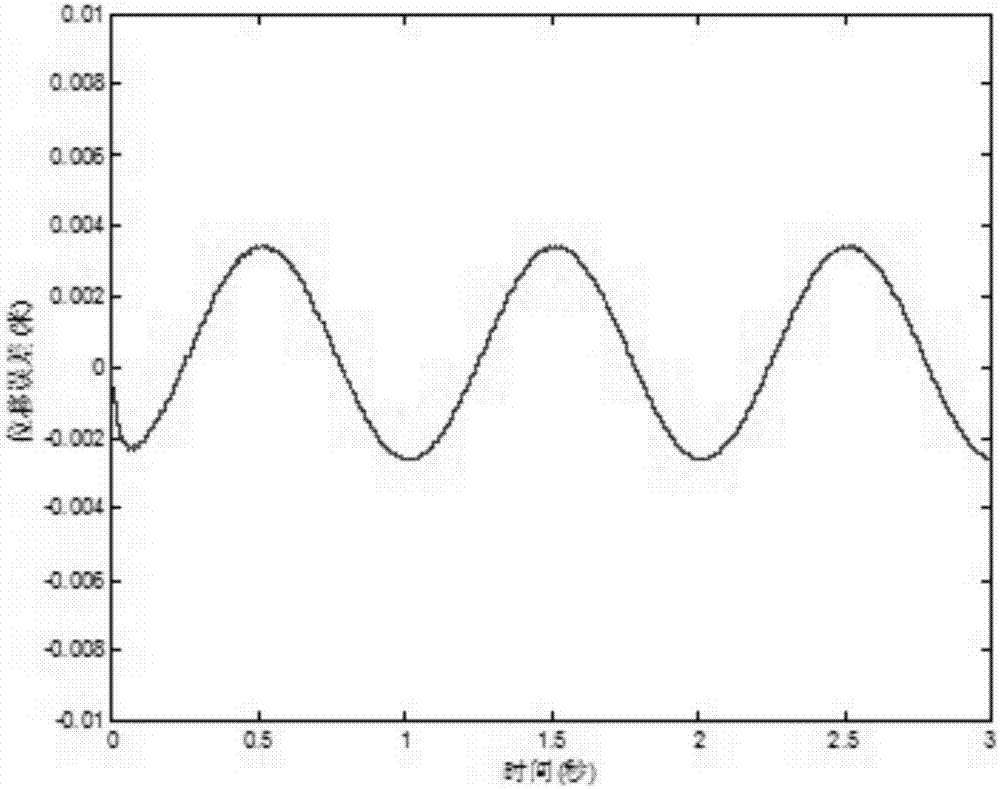
[0063] A kind of simulation control method based on the nonlinear backstepping controller of Matlab of the present invention, comprises the steps:
[0064] (1) Establish the mathematical model of the magnetic levitation ball system
[0065] Neglecting other disturbance forces on the ball, the dynamic equation of the ball in the vertical direction can be obtained from Newton's second law:
[0066]
[0067] In the formula, x is the distance from the magnetic pole to the center of mass of the ball, in m; m is the mass of the ball, in kg; F(i,x) is the electromagnetic force, in N; g is the gravitational acceleration, in m / the s 2 ;
[0068] According to Kirchhoff's law of magnetic circuit, Biot-Savart's law and law of energy conservation:
[0069]
[0070] where μ 0 is the air permeability, μ 0 =4π×10 -7 H / m; A is the pole area of the iron core, the unit is m 2 ; N is the number of turns of the electromagnet coil; x is the instantaneous distance from the center of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com