Upper limb exoskeleton rehabilitation robot control method based on radial basis neural network
A rehabilitation robot and neural network-based technology, applied in the field of upper limb exoskeleton rehabilitation robot control based on radial basis neural network, can solve problems such as the impossibility of finding a one-to-one relationship, difficulties, and increased complexity of rehabilitation robots. To achieve the effect of avoiding patient discomfort and secondary muscle damage and strengthening the rehabilitation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
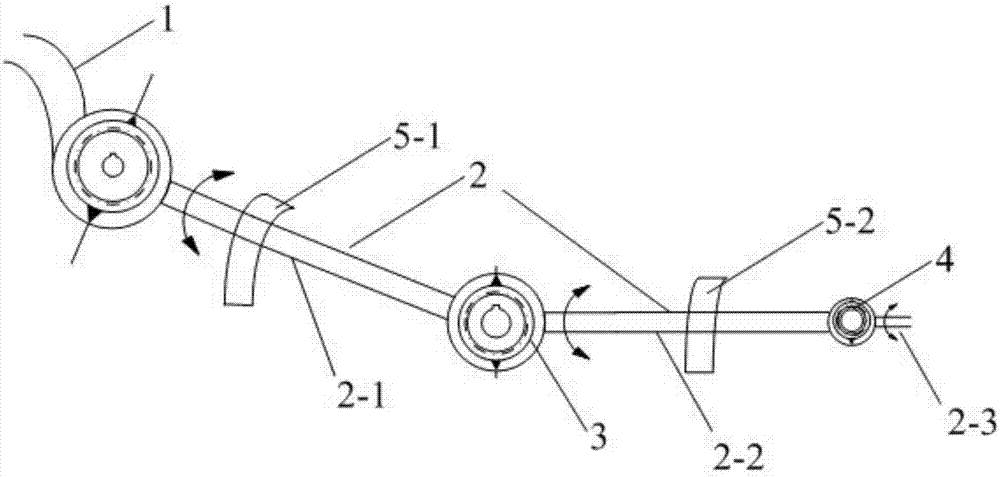
[0031] combine figure 1: The upper limb auxiliary rehabilitation training device of this embodiment is an auxiliary rehabilitation robot fixed on the arm, which is mainly used for realizing the single-degree-of-freedom extension and flexion rehabilitation movement of the upper limb elbow joint and wrist joint for patients with insufficient muscle strength. The mechanism includes a shoulder joint fixation device 1, an upper limb mechanical arm 2, an elbow joint torque controller (drive motor, control chip) 3, a wrist joint torque controller 4 (drive motor, control chip); the upper limb auxiliary mechanical arm includes a large arm Auxiliary rod 2-1, forearm auxiliary rod 2-2, and wrist auxiliary rod 2-3, wherein the upper arm strap 5-1 and the forearm strap 5-2 are used to fix the patient's upper limbs, and each rod is determined by joint torque The controller is connected to drive the movement of the robotic arm.
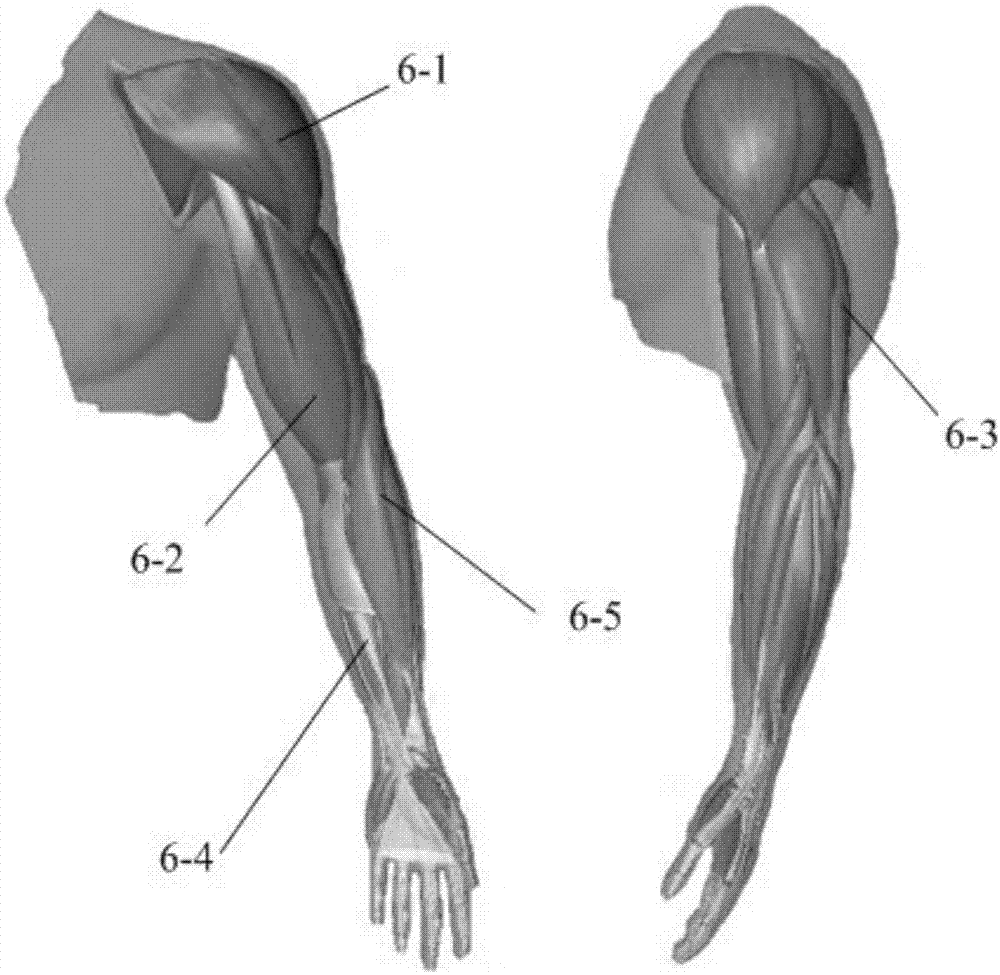
[0032] combine figure 2 , the surface electrodes 6-1, 6-2, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com