Multifunctional intelligent rehabilitation training and assessment system
A technology of rehabilitation training and evaluation system, applied in the field of rehabilitation training, can solve the problems of large volume of functional intelligent robots, small sales of rehabilitation robots, limited application of rehabilitation patients, etc., and achieves strong versatility, low cost, and small size. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described in detail below through specific embodiments in conjunction with the accompanying drawings.
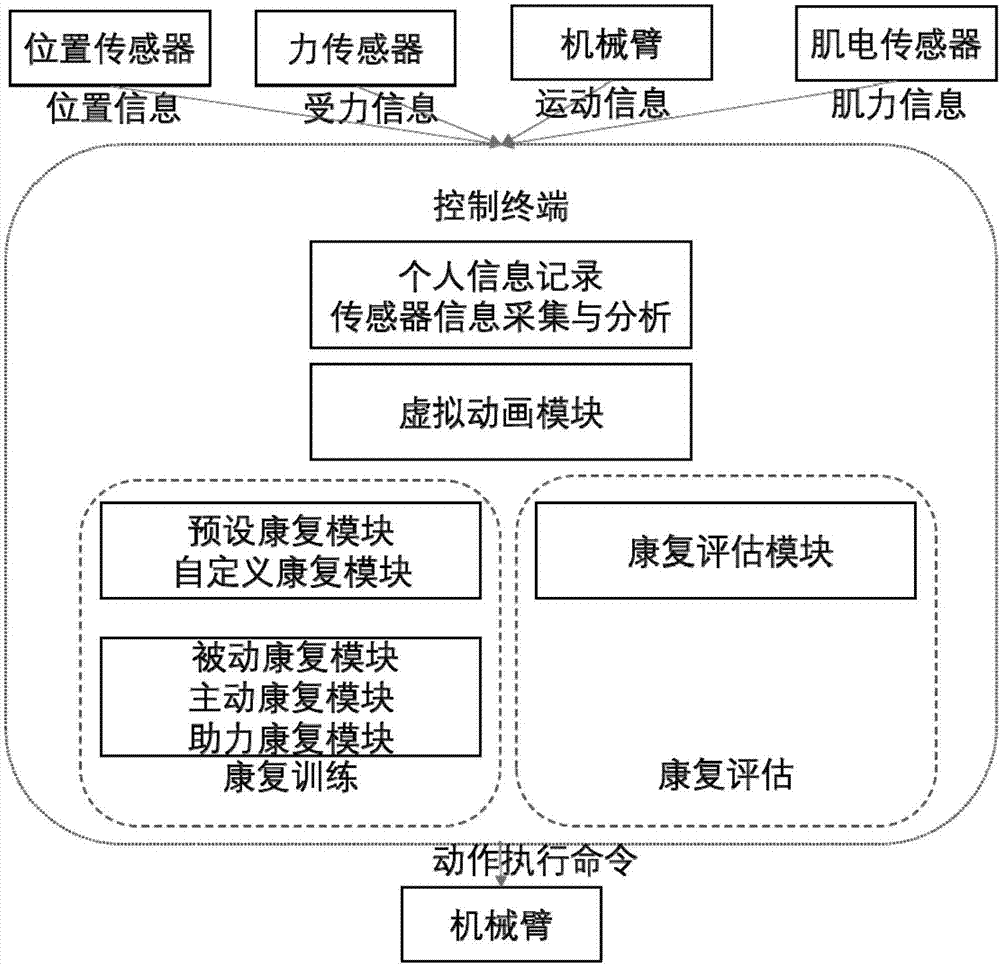
[0018] In order to solve the problems that existing rehabilitation robots are large in size, difficult to treat at the bedside, limited in application to early rehabilitation patients, and high in cost, this example provides a multifunctional intelligent rehabilitation training and evaluation system, such as figure 1 As shown, it includes a control terminal, a mechanical arm for upper and lower limb rehabilitation training, a force sensor, a position sensor, an electromyographic sensor, and a 3D printed brace for fixing different joints of the patient. The arm performs active rehabilitation training, passive rehabilitation training, and assisting rehabilitation training. The robotic arm can replace some repetitive tasks of rehabilitation physicians to the greatest extent and reduce the labor cost of medical institutions. In additio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com