Self-adaptive learning preset performance control method of nonlinear system
An adaptive learning, nonlinear system technology, applied in the field of adaptive learning preset performance control of nonlinear systems, can solve the problems of transient and steady-state performance relying on a posteriori parameter adjustment, difficult a priori design, etc., to achieve enhanced Robust and adaptive, low-complexity effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
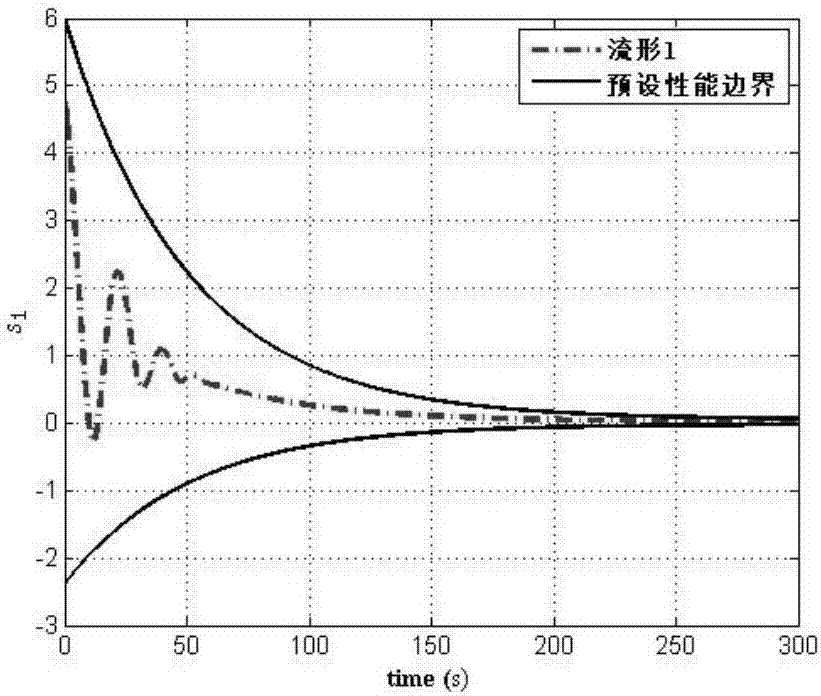
[0088] Taking the fixed-point tracking control of the ground vehicle as the simulation object, the 12 parameters ρ of the three preset performance functions in the simulation experiment s,10 ,ρ s,20 ,ρ s,30 ,ρ s,1∞ ,ρ s,2∞ ,ρ s,3∞ ,κ s,1 ,κ s,2 ,κ s,3 ,, Take them as 6, 35, 3, 0.05, 0.1, 0.05, 0.02, 0.02, 0.05 respectively; control gain k 1 ,k 2 ,k 3 Take 600,800,200 respectively; manifold parameter β=diag{1,1,2}.
[0089] The parameters of the ground car are: inertia matrix M=diag{M 1 , M 2 , M 3}, where M 1 =500kg, M 2 =1000kg, M 3 =700kgm 2 , the Coriolis matrix C is:
[0090]
[0091] in:
[0092] Evaluation - The number of hidden layer nodes in the executive layer is 10, and the initial values of the weight parameters of the input layer and hidden layer, as well as the hidden layer and output layer are arbitrarily selected in the interval [-0.3,0.3],[-0.2,0.2] .
[0093] The discount parameter factor is 0.95, and the evaluation-execution net...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com