


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Multi-agent cluster coordination method and multi-UAV cluster coordination system
A multi-agent, intelligent body technology, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve problems such as poor flexibility, low redundancy, and low mission efficiency of a single UAV system, and achieve rapid Effects of Convergence Ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
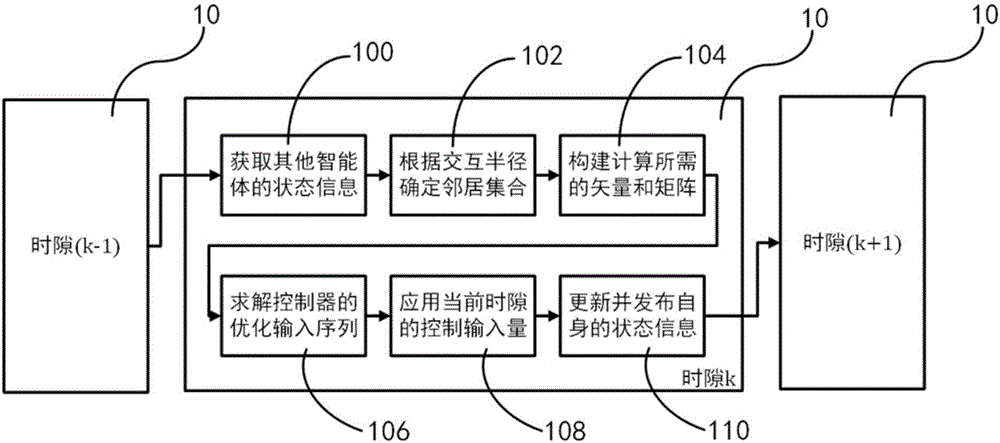
[0029] exist A multi-agent system in space contains N individual agents. Among them, the kinematic model of each agent follows the following second-order difference equation:
[0030]
[0031] Among them, p i (k), v i (k), u i (k) respectively represent the position, velocity and acceleration vector of the agent i at the kth sampling moment; T s is the sampling period of the agent's control system; the controller input for each agent is the constant acceleration u between adjacent sampling instants i (k).
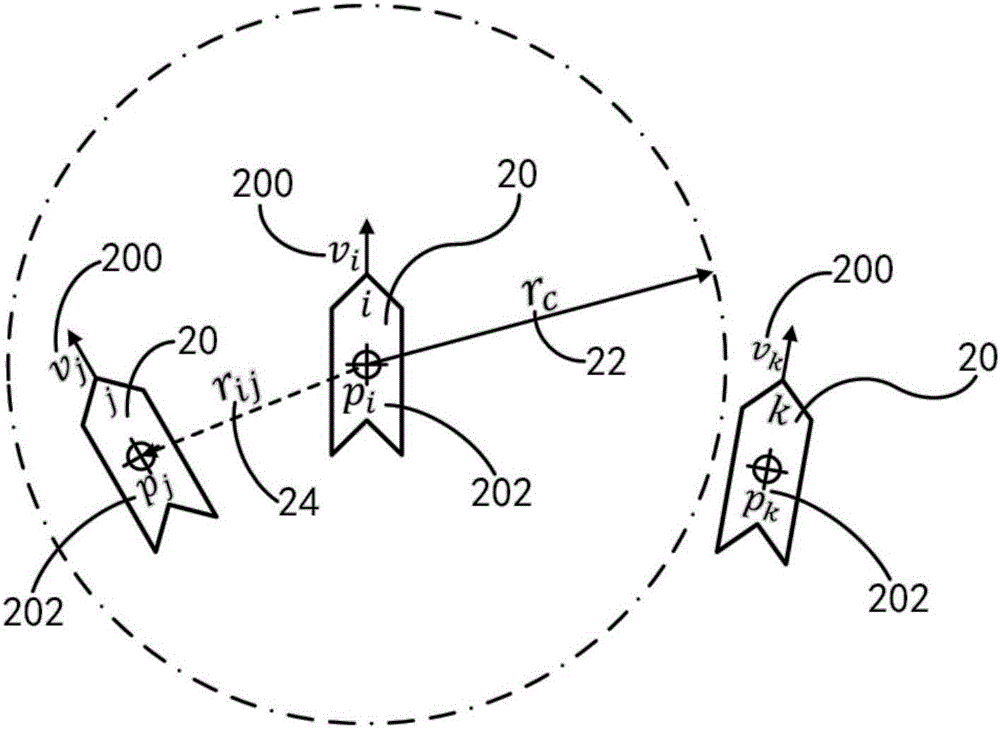
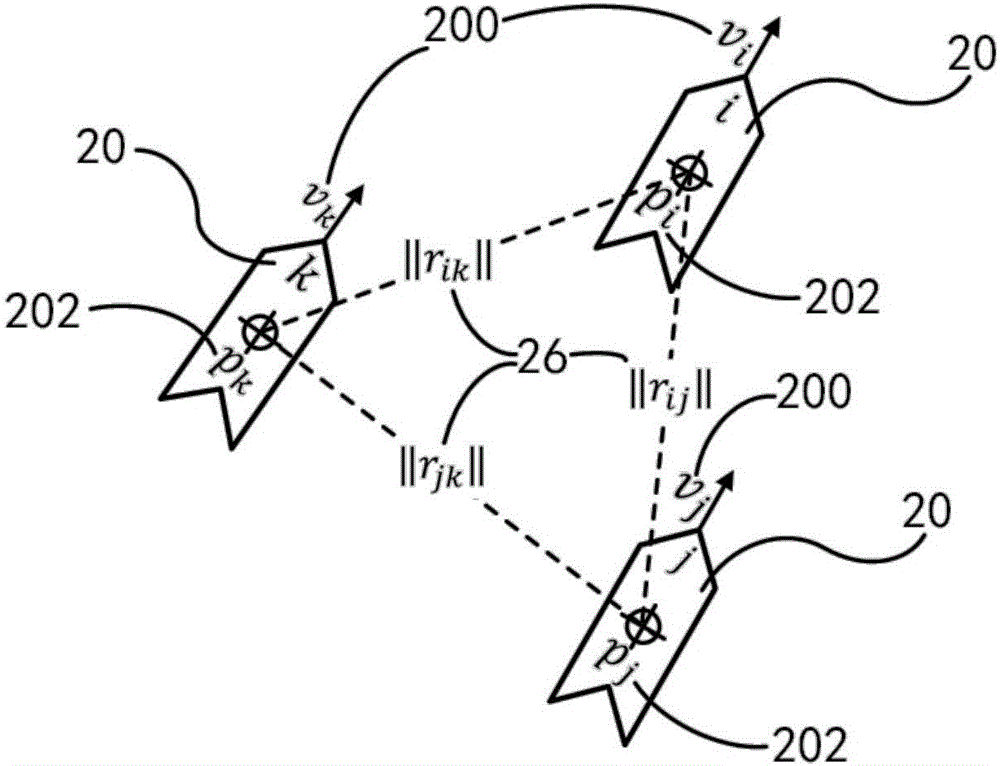
[0032] Each agent is given the same interaction radius r c , agent i can receive data from other agents within its interaction radius by computing the relative position r ij =p j -p i (j≠i), and press Determine the set of neighbors for agent i In each sampling period of agent i, due to the change of the spatial position, the set of neighbors Subject to variation, omitted here for brevity without loss of generality The time label k of .
[0033] Such as...
Embodiment 2
[0080] use Figure 5 to Figure 7 The shown device realizes multi-UAV cluster cooperative flight.
[0081] Such as Figure 5 As shown, each quadrotor UAV (30) in the multi-UAV system described in this embodiment includes a flight controller (300), a power system (302,304), a power supply system (306,3060,3062, 3064), sensor systems (308, 3080, 3082, 3084, 3086, 3088), communication systems (310, 3100, 3102, 3104), and other peripherals (312). Wherein, the flight controller (300) is the central control unit of each quadrotor UAV (30). The flight controller can access the data of the sensor through the sensor interface (308), which is used to solve various variables required to control the drone. Among them, the accelerometer (3080), gyroscope (3082) and electronic compass (3084) are used to obtain the attitude of the drone, including pitch, roll, yaw, and angular velocity and angular acceleration in the three axis directions; The barometer (3086) is used to obtain the altitu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com