Multi-phase gait switching control system and control method for power-assisted exoskeleton robot
An exoskeleton robot and exoskeleton technology, applied in the field of robotics, can solve problems such as unsatisfactory gait coordination control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
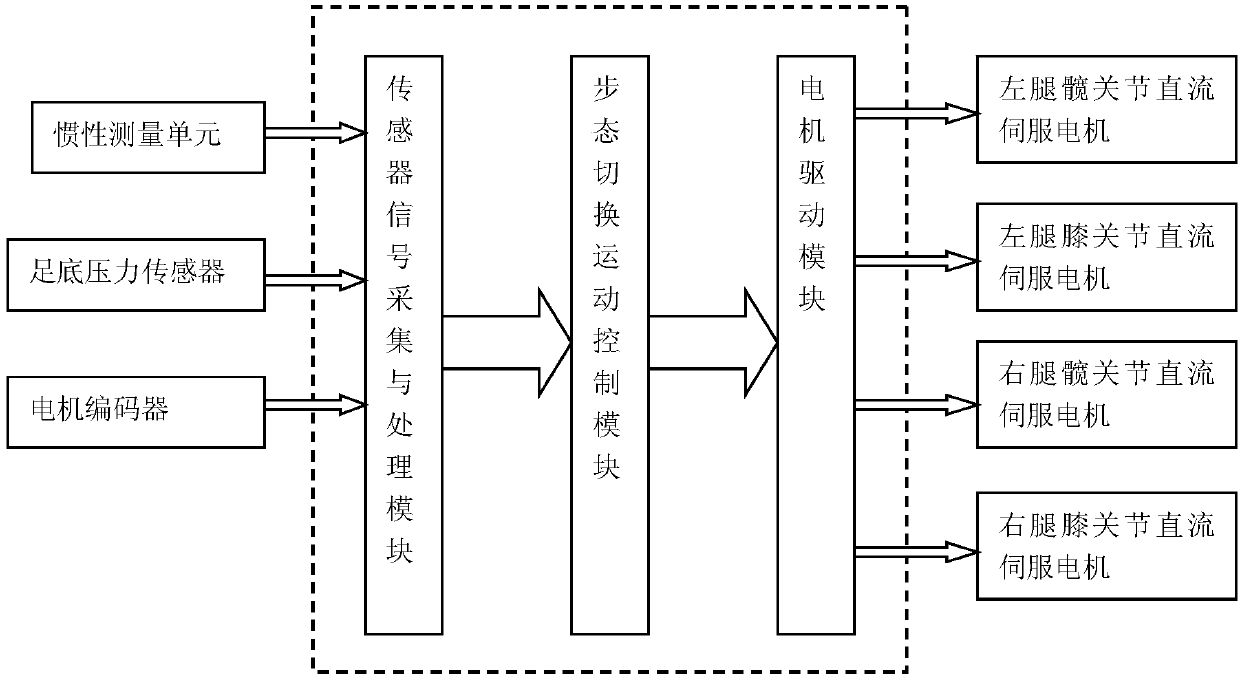
[0093] In this embodiment, a multi-phase gait switching control system and control method for assisted exoskeleton robots is that when the exoskeleton equipment is loaded with a load, the walking phase gait is identified and shunted to obtain the hips of both legs. The output torque of the joint motor and the knee joint motor adjusts the coordination and flexibility of the exoskeleton equipment and the human body through the fit coefficient and the assist adjustment coefficient. Specifically, such as figure 1 As shown, a multi-phase gait switching control system for boosting exoskeleton robots includes: sensor module, DC servo motor, sensor signal acquisition and processing module, gait switching motion control module, motor drive module, CAN bus network and industrial PC Machine; and coordinate the action of exoskeleton equipment under load by outputting specified torque to each joint DC servo motor. Sensors include: inertial measurement unit, plantar pressure sensor, motor e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com