


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A method for identifying moment of inertia and an identifier
A technology of moment of inertia and identification method, which is applied in the field of moment of inertia identification, and can solve the problems of reduced torque fluctuation sampling points, unsatisfactory identification effect, and error of inertia estimation value.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
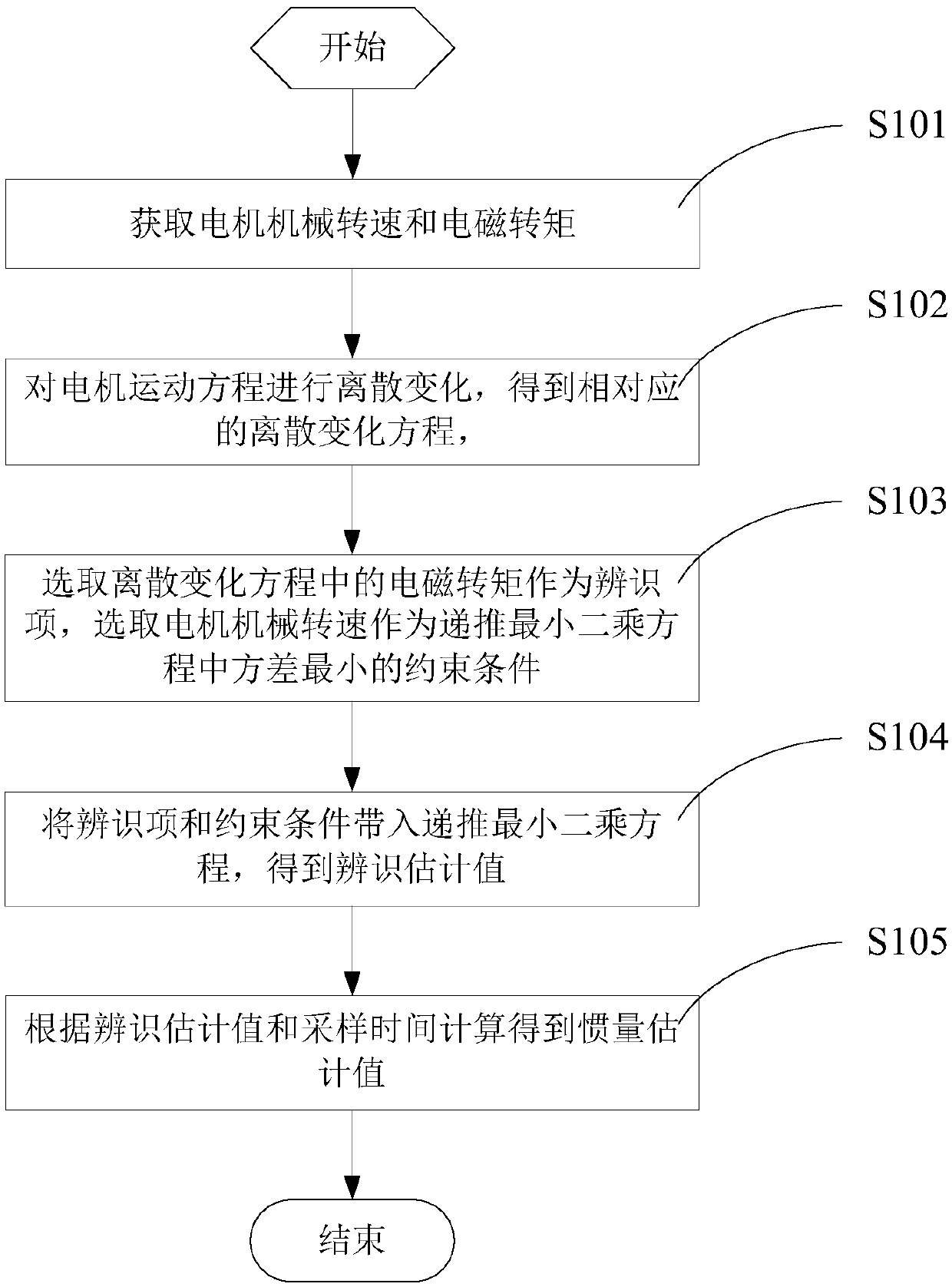
[0100] When the motor motion equation is discretely changed to obtain the corresponding first-order discrete equation, step S102 in the above embodiment specifically includes:
[0101] The motor equation of motion shown in formula (1) is carried out discretization change, obtains the first-order discrete equation as shown in formula (5), and described formula (5) is specifically as follows:
[0102]
[0103] Correspondingly, step S103 specifically includes:
[0104] Select the electromagnetic torque T in the discrete variation equation e as discriminator y k ,y k =T e [k-1]-T e [k-2], select the motor mechanical speed ω in the discrete variation equation m As a constraint on the minimum variance in the recursive least squares equation ψ k , ψ k = ω m [k]-2ω m [k-1]+ω m [k-2].
[0105] In the identification term y k and the constraints ψ k Bring in the recursive least squares equation shown in formula (2) to formula (4) to get the identification estimated value ...
Embodiment 2
[0113] When the motor motion equation is discretely changed to obtain the corresponding second-order discrete equation, step S102 in the above embodiment specifically includes:
[0114] The motor equation of motion shown in formula (1) is carried out discretization change, obtains the second-order discrete equation as shown in formula (7), and described formula (7) is specifically as follows:
[0115]
[0116] Correspondingly, step S103 specifically includes:
[0117] Select the electromagnetic torque T in the discrete variation equation e as discriminator y k ,y k =T e [k-1], select the motor mechanical speed ω in the discrete variation equation m As a constraint on the minimum variance in the recursive least squares equation ψ k ,
[0118] In the identification term y k and the constraints ψ k Bring in the recursive least squares equation shown in formula (2) to formula (4) to get the identification estimated value θ k Afterwards, step S105 in the above embodim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com