A mobile robot positioning method based on laser scanner and strong reflective signs
A technology of laser scanners and mobile robots, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the impact of sensory camera performance, and achieve the effects of reducing system complexity, algorithm complexity, and less changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention is described in detail below in conjunction with accompanying drawing:
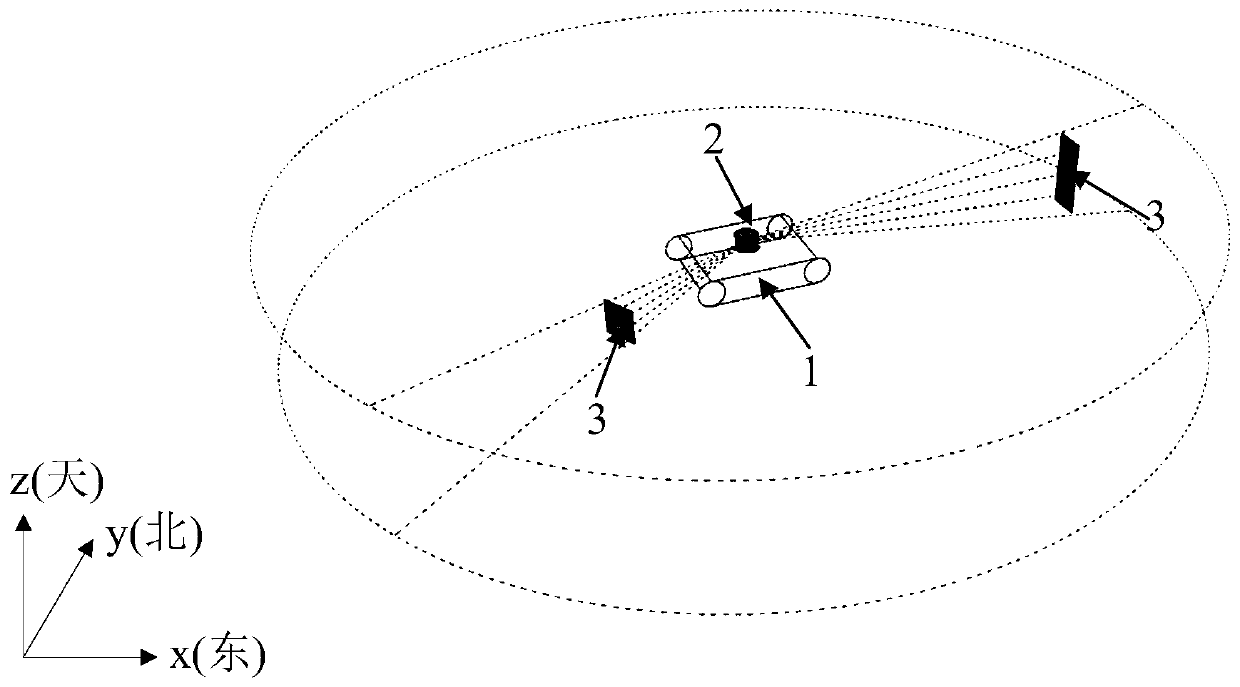
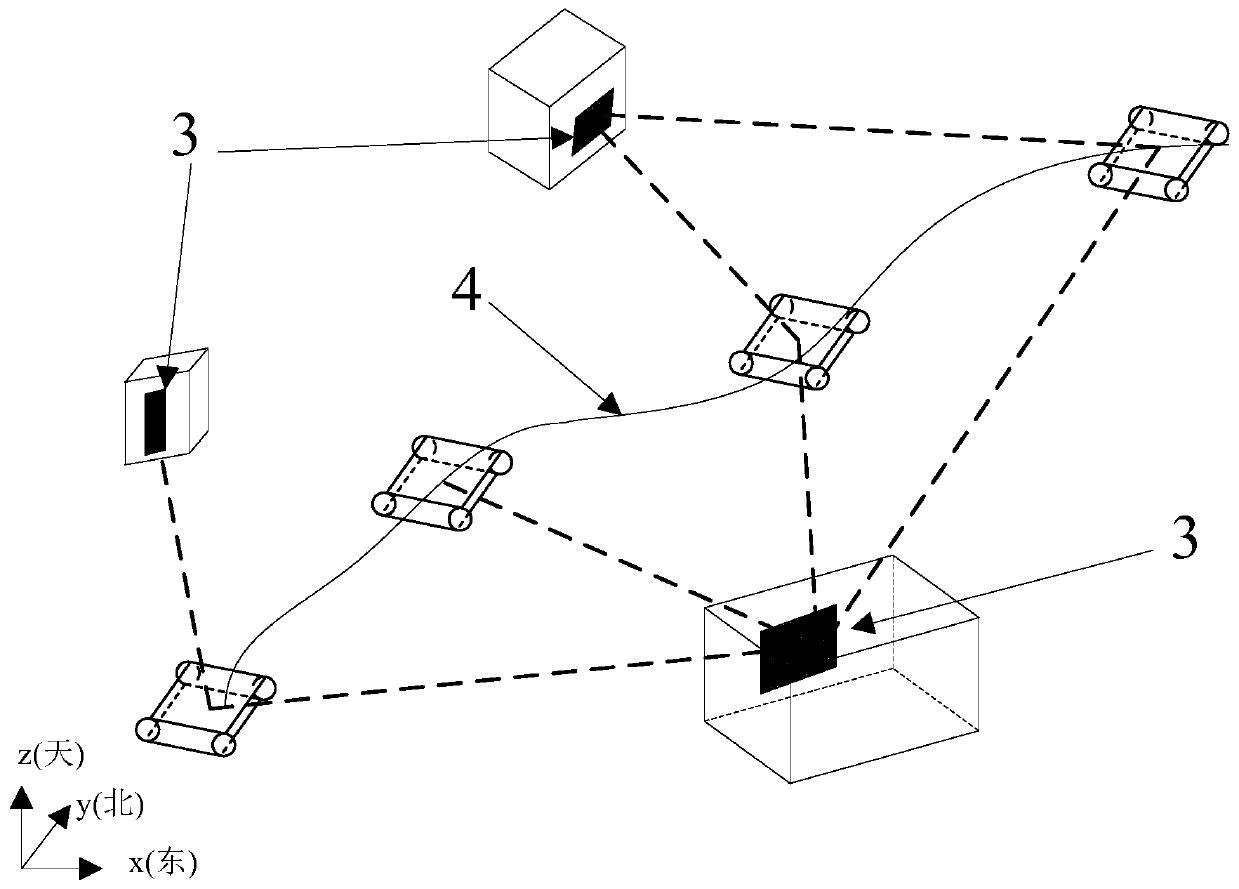
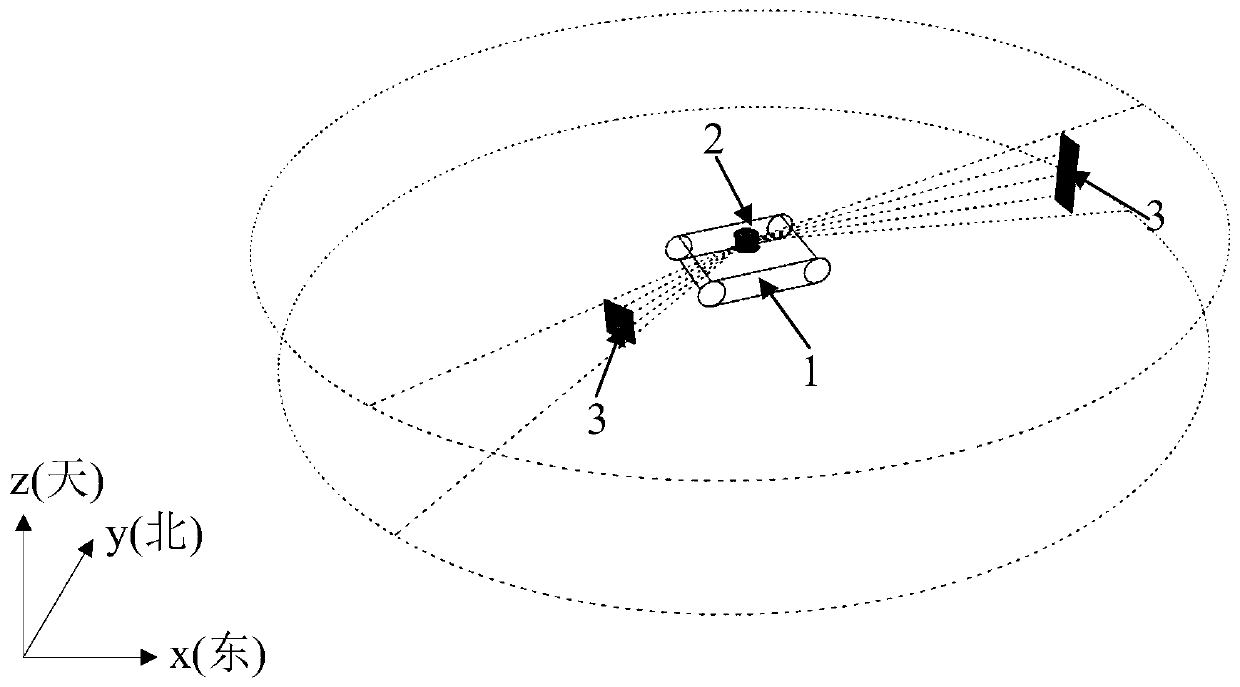
[0042]The invention discloses a positioning method for a mobile robot 1 based on a laser scanner 2 and a strong reflective mark 3. The basic principle of the method is to construct an environment monitoring mobile robot 1 composed of a multi-line laser scanner 2 and a strong reflective mark 3 The system uses the ambient light intensity data and distance data obtained by the multi-line laser scanner 2 to realize the identification and relative positioning of the strong reflective sign 3, and then calculates the distance and slope information of the two lines connecting the reflective signs, and then realizes the reflection through data matching. The global positioning of the sign, and finally the position information acquisition of the robot 1 in the global environment is realized through the relative positional relationship between the robot 1 and the reflective sign.
[0043]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com