Robot model algorithm realization method based on FPGA
A technology of model algorithm and implementation method, which is applied in the field of FPGA implementation, can solve problems such as large amount of calculation, high processing cost, and difficulty in ensuring real-time performance, and achieve the effect of low power consumption and improved processing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
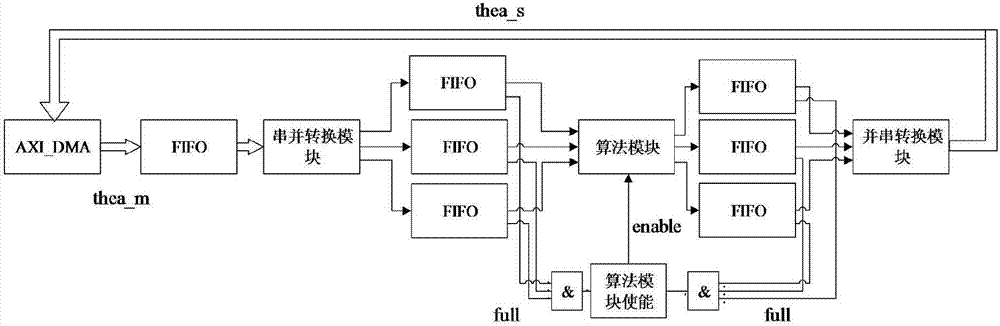
[0051] The above-mentioned FPGA-based robot model algorithm implementation method, the DMA module is used to realize the big data interaction between the upper processor and the FPGA, the DMA module receives the angle information theam_s of each joint of the main hand from the upper processor, and sends it to the upper processor What is returned is the angle information theas_s of each joint of the hand, and the data format is axi4-stream, which is a serial data stream;
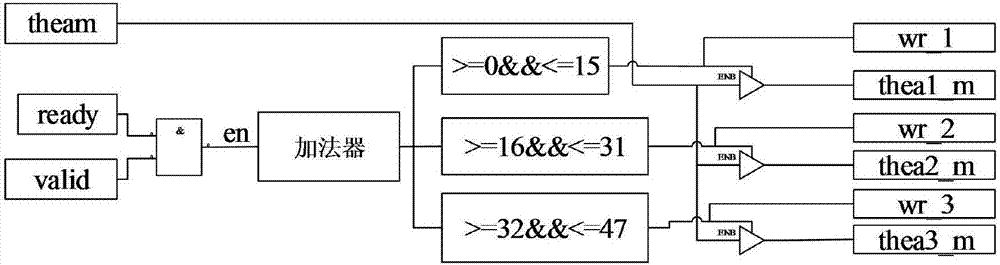
[0052] After obtaining the serial data of the angle information of each joint of the main hand, enter the serial-to-parallel conversion module to obtain parallel data,,...,, the block diagram of the serial-to-parallel conversion module is as follows figure 2 As shown, according to the angle information of the joints judged by the counter, these data are sent to the FIFO for buffering and sent to the robot model calculation module;
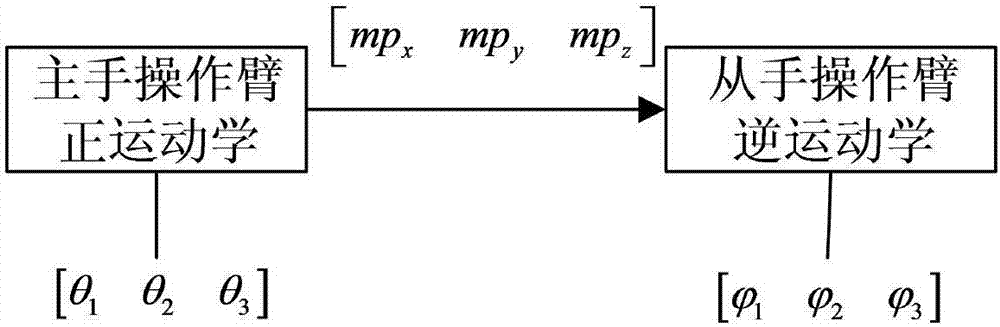
[0053] The robot model calculation module mainly needs to solve the calculat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com