A Spacecraft Attitude-orbit Integrated Backstepping Tracking Control Method
A tracking control and spacecraft technology, applied in attitude control, three-dimensional position/channel control, etc., can solve problems such as poor tracking effect, and achieve the effect of great practical application engineering value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0094] Specific embodiment one: a kind of spacecraft attitude-orbit integration back-step tracking control method comprises the following steps:
[0095] Quaternions and Dual Quaternions
[0096] Quaternions were proposed by Hamilton in 1843, and they are the extension of complex numbers in four-dimensional space, also known as hypercomplex numbers. The quaternion can be expressed as q=[η,ξ], where η is a real number, called the scalar part, ξ=ξ x i+ξ y j+ξ z k is the quaternion vector part, i, j, k are unit direction vectors orthogonal to each other, ξ x , ξ y , ξ z is a real number, representing the components of the quaternion vector part in the three directions of i j k. Define the following dual quaternion algorithm:
[0097] q 1 ±q 2 =[η 1 ±η 2 ,ξ 1 ±ξ 2 ] (1)
[0098] λq=[λη,λξ] (2)
[0099]
[0100]
[0101] q -1 =q * / ||q|| (5)
[0102] Among them, q 1 ,q 2 are all quaternions, λ is a real number, is the quaternion multiplication, q * is t...
specific Embodiment approach 2
[0296] Specific embodiment two: the difference between this embodiment and specific embodiment one is: the specific process of establishing the relative kinematics and dynamics model of spacecraft attitude-orbit integration based on the dual quaternion in the step one is:
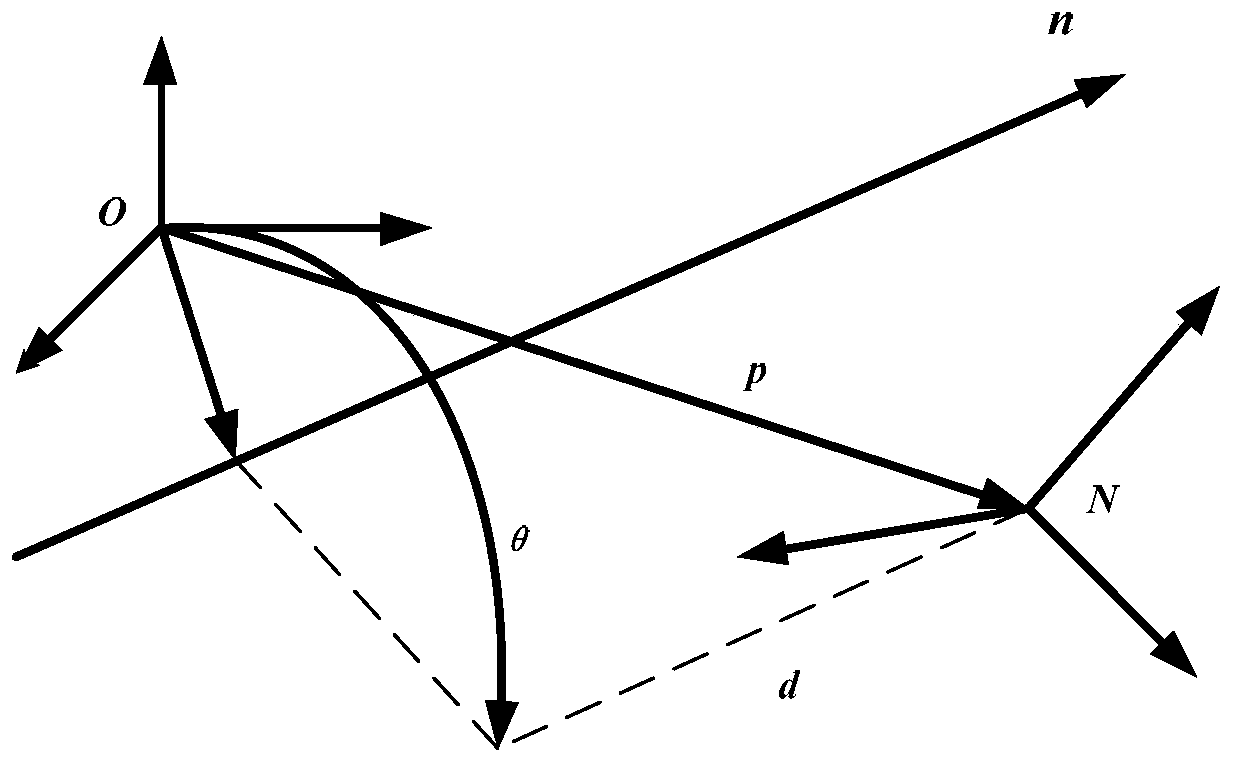
[0297] Define O l -X l Y l Z l is the body coordinate system of the target spacecraft, O f -X f Y f Z f is the body coordinate system of the tracking spacecraft. Use the bias quaternion representation to track the relative motion of the spacecraft:
[0298]
[0299] in is the dual quaternion of the deviation of the spacecraft relative to the target, is the conjugate of the dual quaternion of the target relative to the geocentric inertial coordinate system, is the dual quaternion of the spacecraft relative to the earth-centered inertial coordinate system;
[0300] Deriving formula (81), the relative kinematic equation of the deviation dual quaternion is obtained:
[0301]
[0302] in f...
specific Embodiment approach 3
[0319] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that the specific process of designing the controller based on the backstepping method in the step 2 is:
[0320] The control objective of the present invention is to make the error amount of tracking the state of motion of the spacecraft in consideration of external disturbances as well as which is, in (·) v is the corresponding vector part.
[0321] When there are external disturbances and model uncertainties, (85) can be rewritten as:
[0322]
[0323]
[0324] in for The derivative of the dual part of , for the real part of for The cross product matrix of the dual part, I is the identity matrix, is the nominal part representing the dual inertia matrix, is the controller output, represents the total uncertainty of the model;
[0325] Assuming that the total uncertainty of the system has an upper bound, that is
[0326] definition is the dual part ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com