A Cross-Camera Target Matching and Tracking Method Combined with Spatiotemporal Topology Estimation
A cross-camera and target matching technology, applied in the field of cross-camera target matching and tracking combined with spatio-temporal topology estimation, can solve the problems of not making good use of camera network topology information and difficulty in pedestrian feature matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
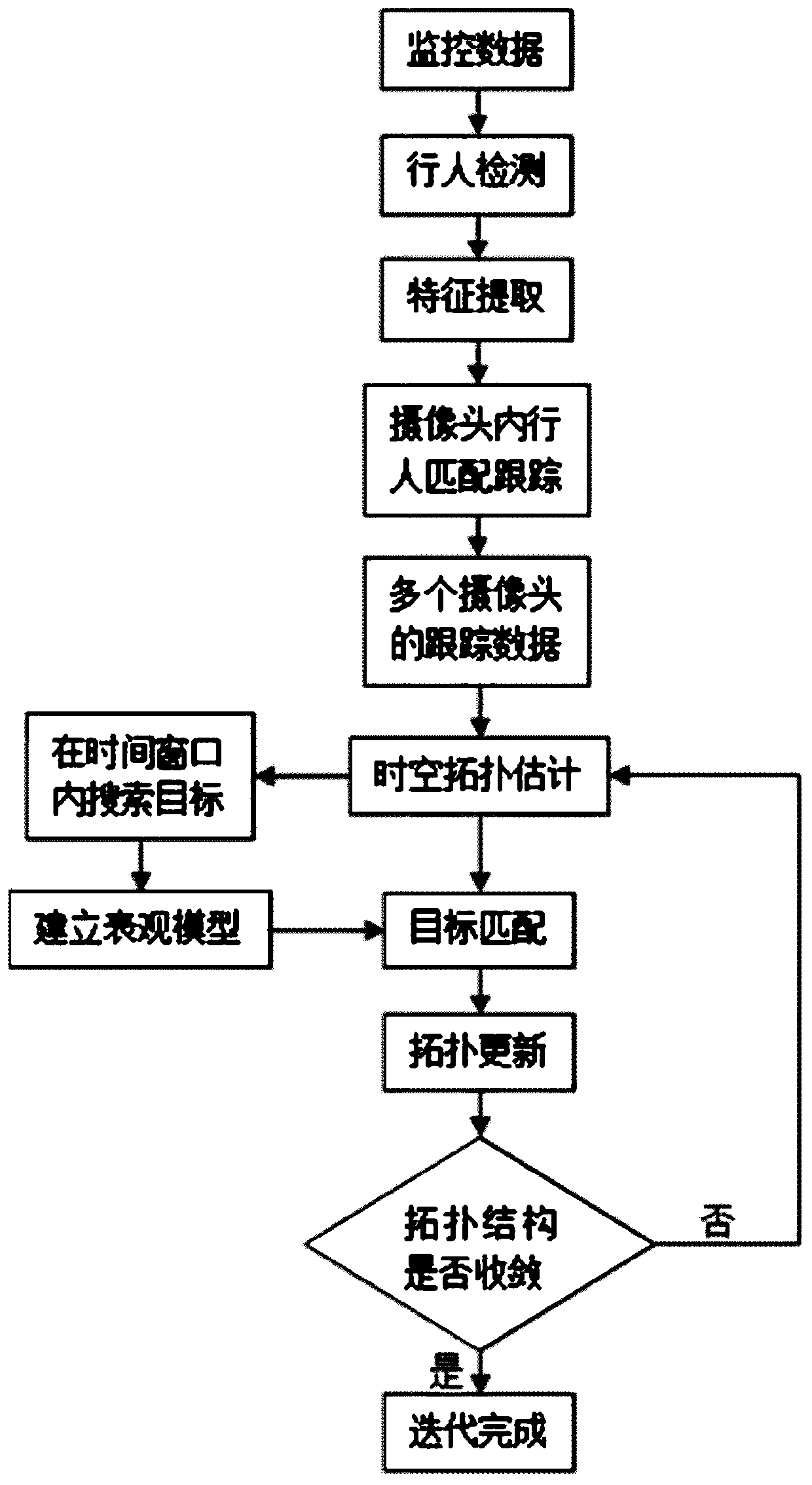
[0075] The pure appearance feature matching does not consider the spatial topological relationship and time correlation constraints of the multi-camera network. If the space-time constraints are incorporated into the framework of target tracking, then the target matching between multiple cameras can obtain space-time clues, which can Greatly improve the accuracy of matching and tracking. Therefore, the present invention proposes a method combining target tracking and matching with topology estimation. Firstly, the current topological relationship is unsupervisedly established by using the current target matching result, and then the appearance model is combined with space-time constraints in the Bayesian framework. In turn, topological relationships are used to provide spatiotemporal clues for target matching, and continuous iteration makes the system stable, thereby achieving better multi-camera collaborative tracking.
[0076]Topology estimation mainly includes two aspects: ...
Embodiment 2
[0137] In order to verify the effectiveness of the algorithm, this embodiment collects the video data of a monitoring network consisting of five cameras in the building where the laboratory is located as the experimental object, and compares the experimental results with the real results of manual labeling, and then Two indicators, Precision and Recall, are used to characterize the optimization effect of the iterative algorithm. in,
[0138]
[0139]
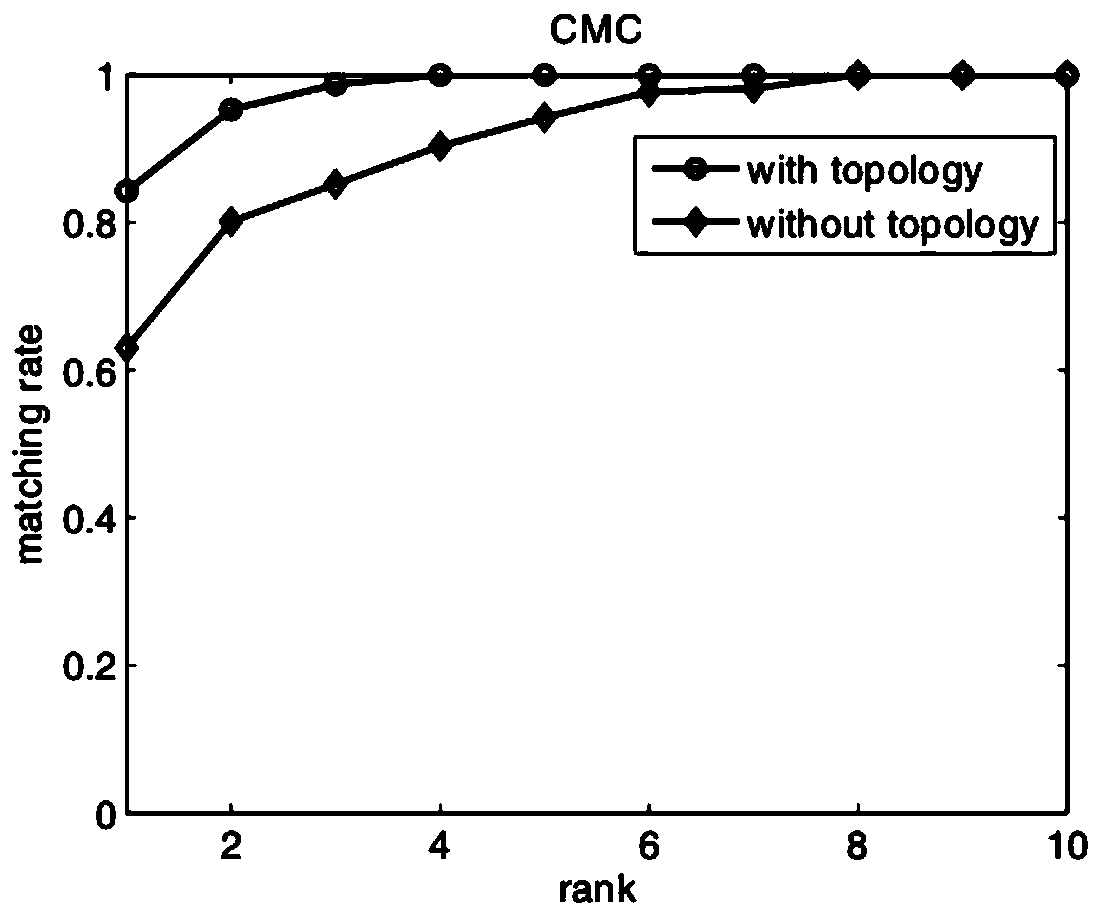
[0140] Table 1 shows the changes in the precision rate and recall rate during the algorithm iteration process. It can be seen that the first iteration, that is, the initial state, is not effective because topology information is not used. As the algorithm continues to iterate, the monitoring network The topological information is effectively used, and the effect has been significantly improved. After that, the topological structure tends to be stable, so the effect also tends to be stable. Simultaneously, image 3 A comp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com