Pipeline inner wall cleaning robot, control circuit and work method
A technology for cleaning robots and pipes, applied in cleaning methods and appliances, chemical instruments and methods, cleaning hollow objects, etc., can solve problems such as low efficiency, high labor costs, and low cleanliness, and achieve improved work efficiency and compact structure , adapt to a wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
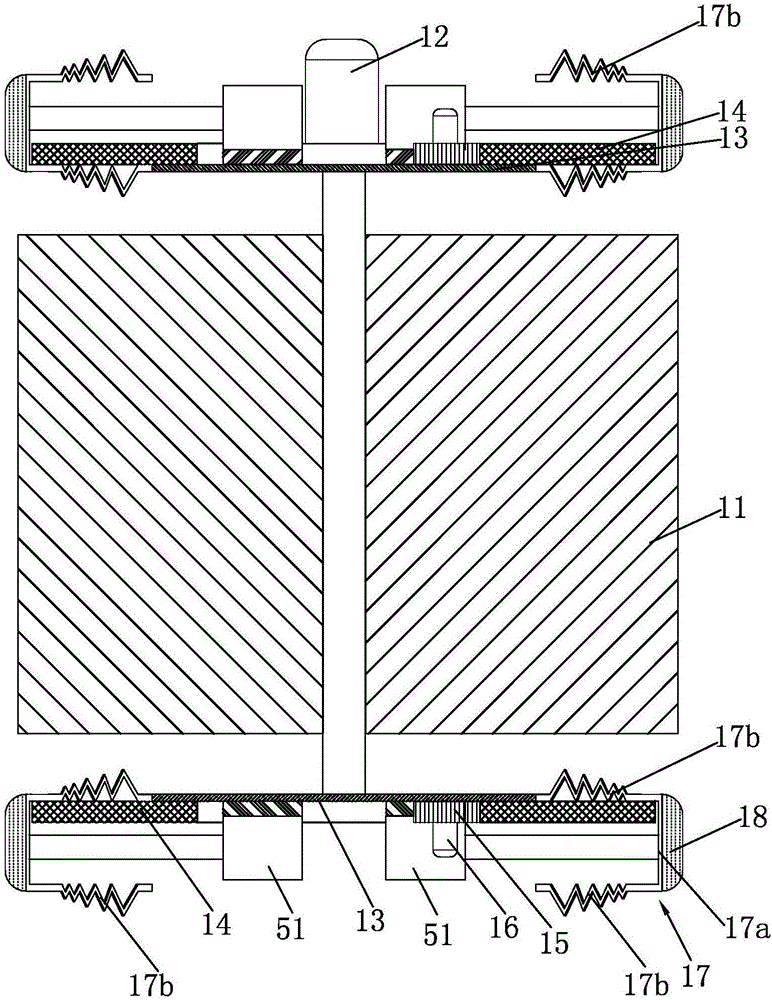
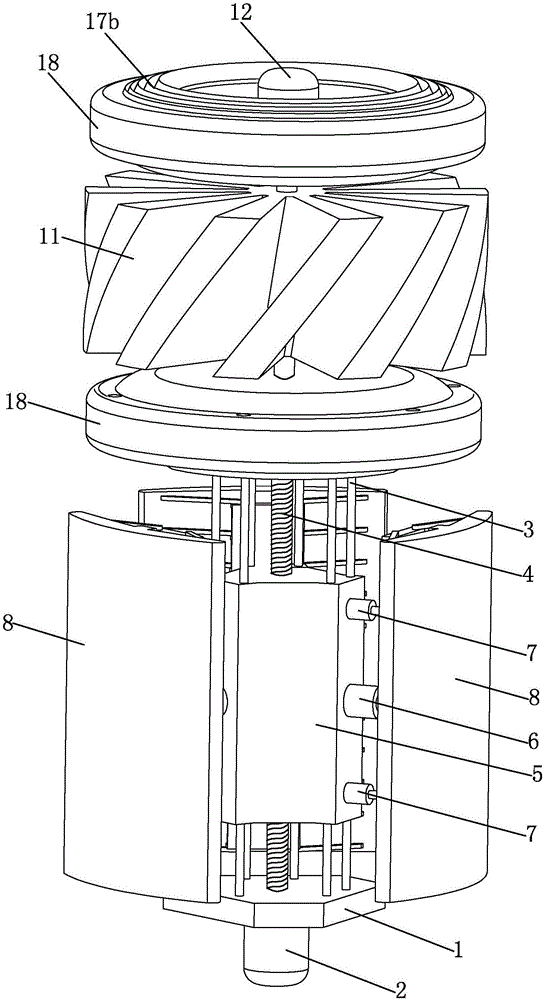
[0038] Such as Figure 1-6 As shown, a pipeline inner wall cleaning robot is mainly composed of a lower mounting plate 1, a motor 2, a guide shaft 3, a screw rod 4, a nut 5, a radial telescopic assembly, a rolling brush 11, a rolling brush motor 12, and a sealing and fixing device. . Wherein, a motor 2 and a group of guide shafts 3 are installed on the lower mounting plate 1 , and the upper end of the output shaft of the motor 2 is coaxially connected with the lower end of the screw rod 4 . In this case, the number of guide shafts 3 is at least three, and these guide shafts 3 are arranged circumferentially along the nut 5 . The lower end of the guide shaft 3 is fixed with the lower mounting plate 1, the guide shaft 3 is parallel to the screw mandrel 4, and a nut 5 is threaded on the screw mandrel 4.
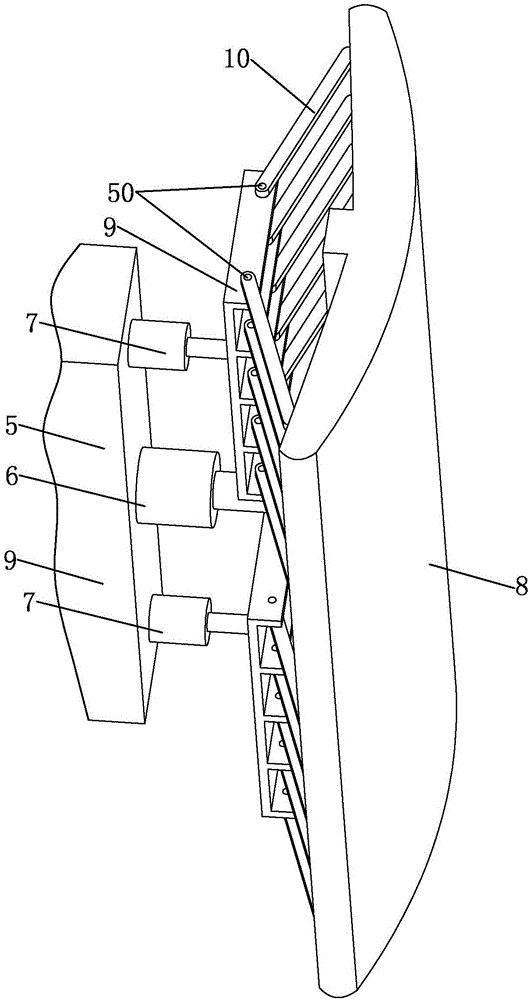
[0039] The nut 5 is provided with at least three radial...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com