Parking violation detection method and system based on multi-feature identification
A detection method and multi-feature technology, which is applied to the traffic control system, traffic control system, instrument and other directions of road vehicles, can solve the problems of decreased control and alarm accuracy, inability to recognize license plates, and inability to be used as evidence for illegal parking penalties, saving manpower Cost, effect of improving accuracy and success rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
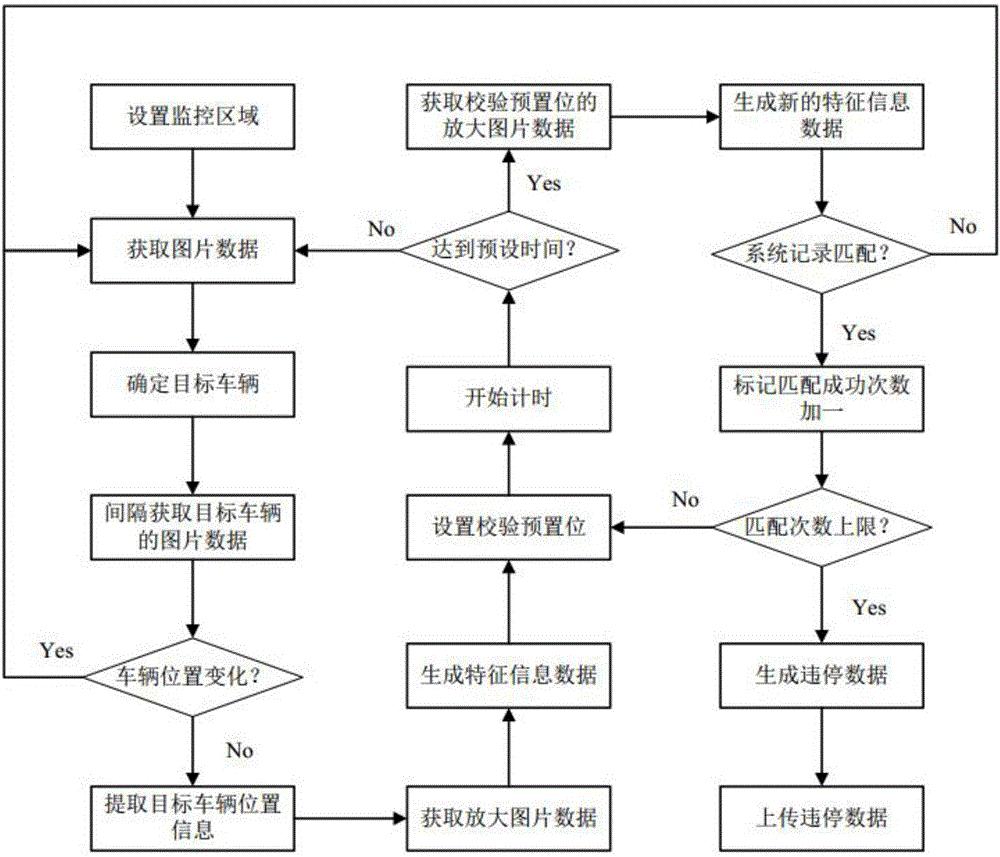
[0098] In step S3, the following steps are also included:
[0099] S301, train the Adaboost classifier according to the picture data;
[0100] S302. Obtain the features of the target in the image data according to the haar-like feature extraction algorithm;
[0101] S303. Input the features of the target into the Adaboost classifier;
[0102] S304. The Adaboost classifier classifies the features of the input target to determine whether it is a vehicle, if yes, determine the target vehicle, and enter step S4, otherwise return to step S2.
[0103] When performing vehicle detection, the vehicle detection is mainly performed by training the Adaboost classifier. Here, the haar-like feature is mainly used as the input of the classifier and the Adaboost iterative algorithm; the haar-like feature is also called the rectangular feature, and a rectangle is divided into black and white rectangular blocks. , the calculation method is to subtract the sum of all pixel values of the wh...
Embodiment 2
[0105] In step S301, while the Adaboost classifier is being trained, it also selects target features.
[0106] The Adaboost classifier is a classifier based on the cascade classification model, which is divided into several cascades, and each cascade is composed of multiple tree classifiers. While adding feature information to the Adaboost classifier to make it learn and train, it also The target features can be screened to select the closest feature.
Embodiment 3
[0108] In step S5, the following steps are also included:
[0109] S501. Generate a center point of the target vehicle in each piece of picture data according to the acquired pieces of picture data;
[0110] According to the Adaboost classifier, each piece of picture data is detected, and the coordinate information of the vehicle target rectangle frame of each piece of picture data is obtained, and the center point coordinate of the target vehicle is obtained through the coordinate information.
[0111] S502. Calculate the displacement of the center point;
[0112] Compare the coordinates of the center point in each image with the coordinates of the center point in the next image, and obtain the displacement between the center points according to the Euclidean distance algorithm.
[0113] S503, judging whether the displacement of the center point is smaller than the threshold value, if yes, go to step S6.
[0114] If the displacement of the center point of the target vehicle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com