Adaptive segmentation multistage linear spectrum generalized standard control missdistance reentry guidance method
A technology of standard control miss amount and linear pseudospectrum, which is applied in the field of multi-segment linear pseudospectrum generalized standard control miss amount reentry guidance, and can solve problems such as errors, enhanced algorithms, and few terminal constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
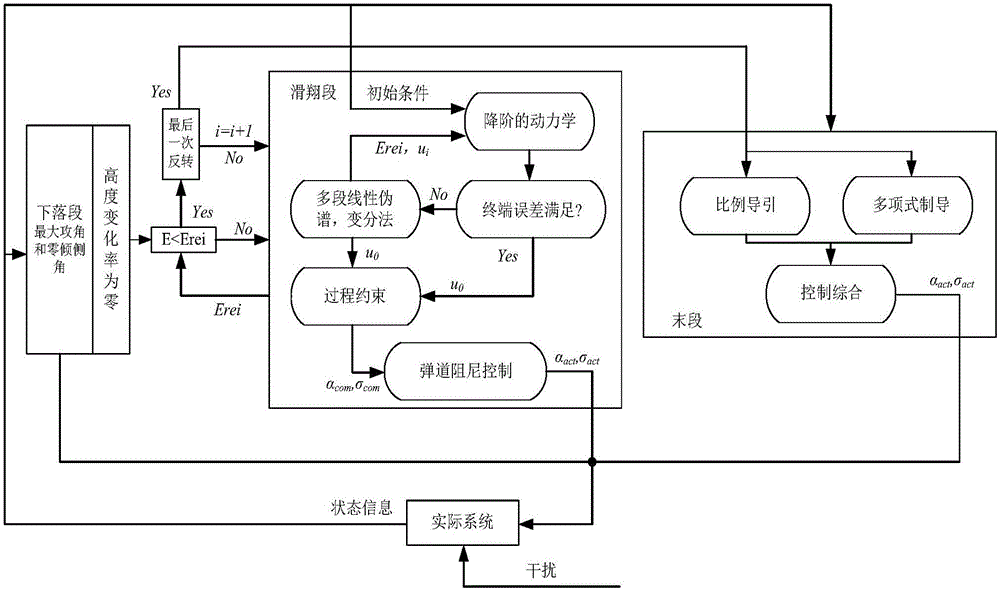
[0093] The self-adaptive segmented multi-segment linear pseudo-spectrum generalized standard control off-target amount reentry guidance method, the specific steps are as follows:
[0094] (1) Initialization: Set the initial and terminal calculation simulation parameters, and obtain reasonable initial control parameters and segment time initial values through offline ballistic optimization.
[0095] That is, initial modeling, as follows:
[0096] 1.) Reentry Kinetic Equation
[0097] Under the assumption of a sphere and a rotating Earth, the three-degree-of-freedom particle reentry dynamics equation can be expressed as
[0098]
[0099] Among them, all dynamical equations are derivatives of time, r represents the distance from the center of mass of the aircraft to the center of the earth, and the unit is m; θ and φ represent the longitude and latitude of the position of the aircraft, respectively, and the unit is °; Indicates the velocity of the aircraft relative to the ...
Embodiment 2
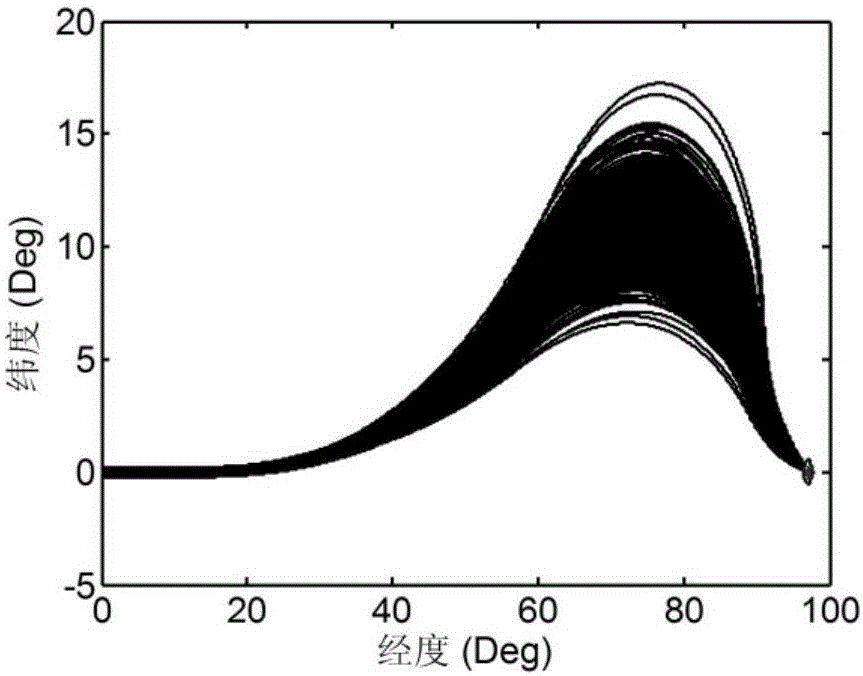
[0269] In this embodiment, the Monte Carlo simulation target shooting test considering model uncertainty and random pull bias will be used to verify the adaptive segmented multi-segment linear pseudo-spectrum generalized standard-controlled miss-target amount online planning and reconstruction proposed in Embodiment 1 of the present invention. The performance of the input guidance method. The simulation model is the CAV-H introduced in Section 3) of the initialization step in Embodiment 1. The random deviation considered includes the initial state deviation (altitude, latitude and longitude, speed, ballistic inclination and heading angle), aerodynamic deviation and atmospheric environment deviation. The initial state and terminal state are shown in Table 1. In addition, the The roll angle and heading error angle converge to zero, and the 3-sigma values of random disturbances are shown in Table 2. The update cycle of guidance instructions is 1Hz, and all programs are run in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com