


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Shape optimization algorithm for three-dimensional product model
A product model and optimization algorithm technology, which is applied in computing, 3D modeling, image data processing, etc., can solve the problems of irregular optimization boundaries, time-consuming and laborious grid division, and reduced optimization efficiency, so as to reduce design variables and improve computational efficiency. Enhanced, interactive and convenient effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
experiment example 1
[0077] Experimental example 1: Shape optimization of a cantilever beam with ridges
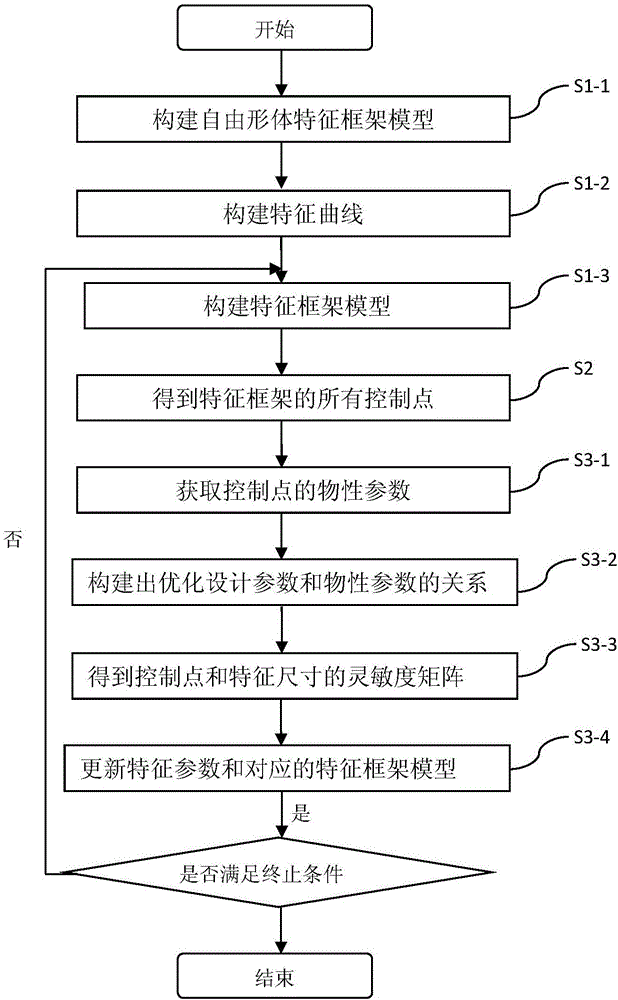
[0078] Its shape optimization algorithm includes the following steps:
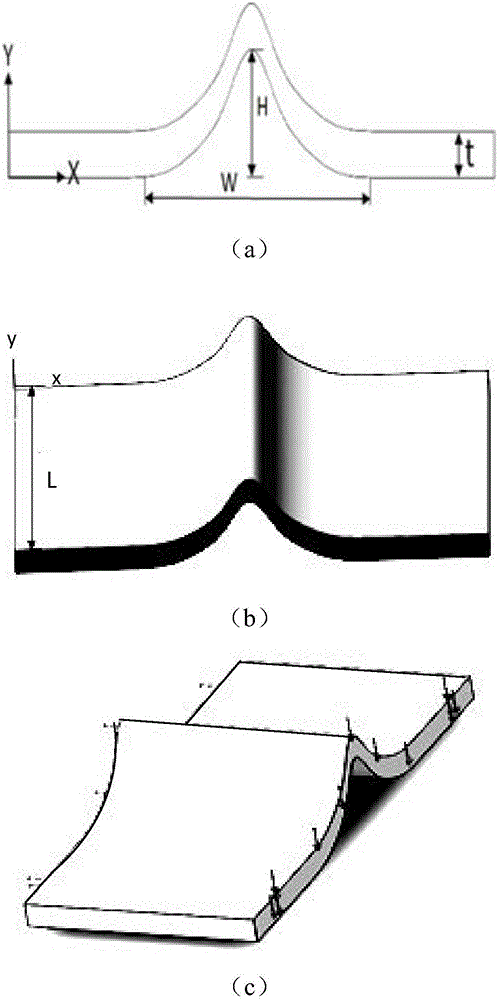
[0079] Step 1, establish the characteristic frame model of the cantilever beam with ridges, such as image 3 (a) and image 3 As shown in (b), the feature size of the feature frame model includes the width W of the ridge, the height H of the ridge, the overall thickness t, and the length L of the ridge, such as image 3 As shown in (c), the load of the model is that the end face of Z=0 is subjected to a uniform tensile force F=-50N along the negative direction of the y-axis, and the boundary condition is that the end face is completely fixed;
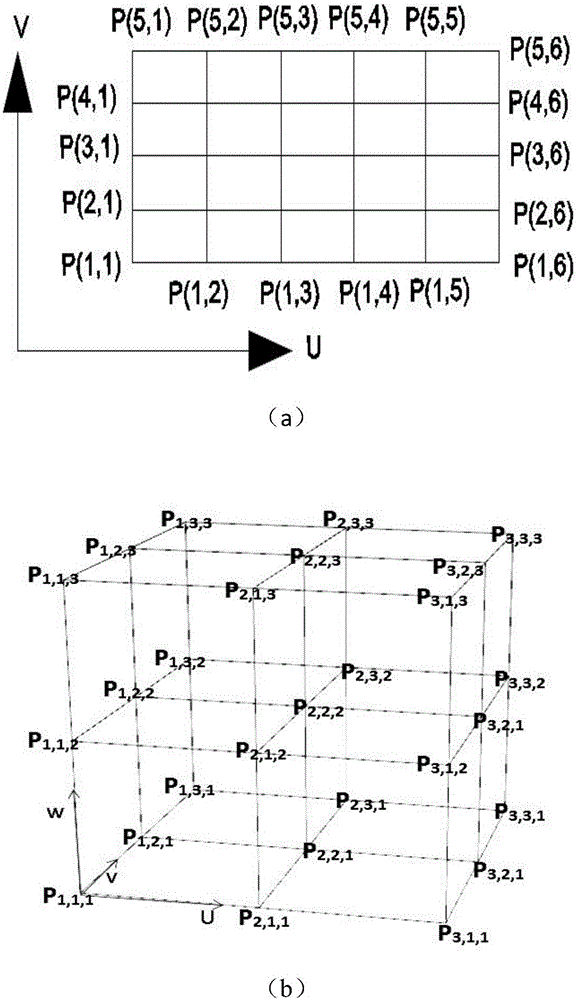
[0080] Step 2, get the coordinate matrix of cantilever ridge parameterized control points according to equations (18)-(21):
[0081] x 1 ′ = x 1 + W - ...
experiment example 2
[0100] Experimental Example 2: Shape Optimization Algorithm of Dredging Reamer Arm
[0101] Step 1, establish the characteristic frame model of the dredging reamer arm, such as Figure 5 As shown, the characteristic dimensions of the characteristic frame model include the axial width bW and axial length bL of the bottom surface of the reamer arm, the axial width tW and axial length tL of the upper top surface, the height H of the reamer arm, and the load and boundary conditions are : The upper bottom surface and the lower bottom surface of the reamer arm are fixedly constrained, and a concentrated force is applied at the specified control point.
[0102] Step 2, when the feature size type is length, the mapping function is derived. Let there be any two points in the space (x 0 ,y 0 ,z 0 ) and (x 1 ,y 1 ,z 1 ), along the X-axis, Y-axis, Z-axis direction feature size by W 0 , L 0 ,H 0 become W, L, H, and change (x 0 ,y 0 ,z 0 ) as a fixed point, set the moving point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com