Face detection tracking method and device and robot head rotation control method and system
A face detection and robot technology, applied in the field of face recognition, can solve the problems of inaccurate robot head rotation process, high false detection rate of face detection, non-face detection of adult faces, etc., to ensure smoothness and security. Continuity, the effect of reducing the false detection rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
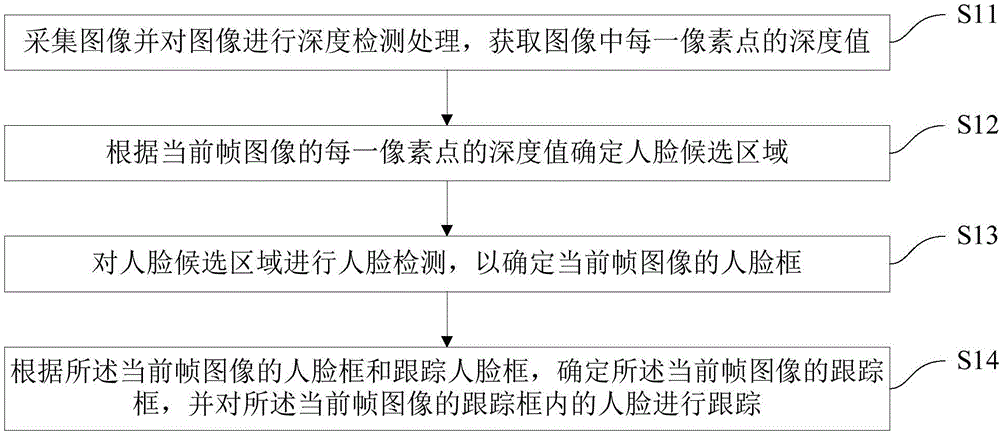
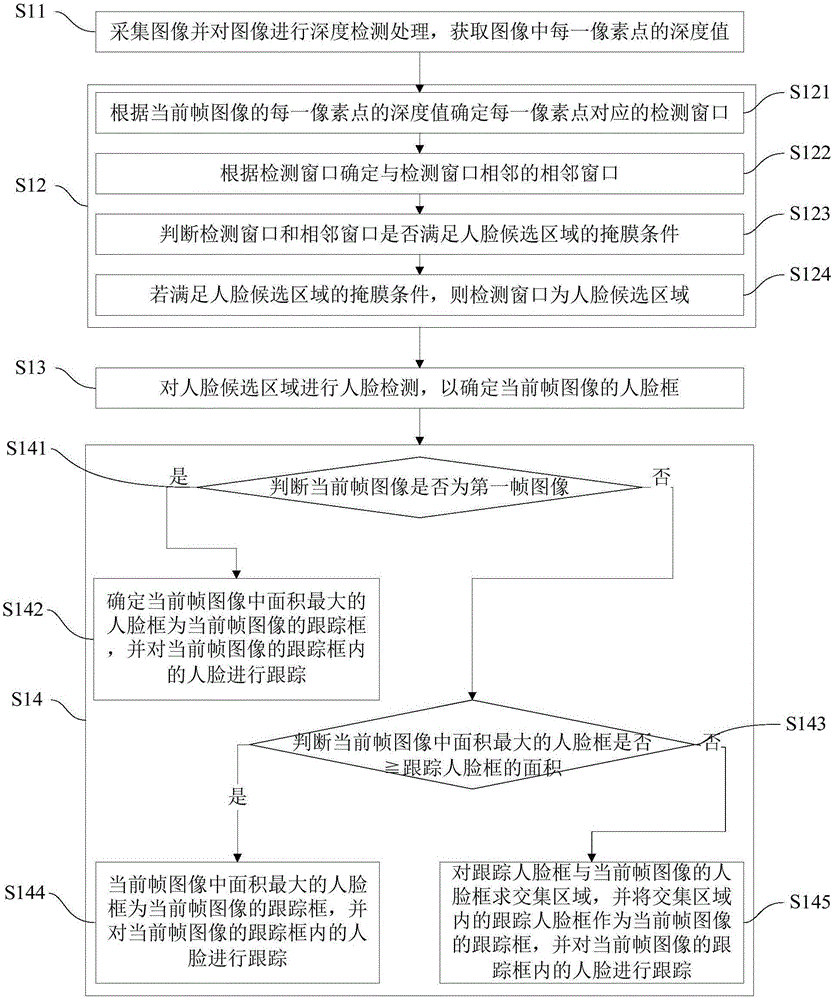
[0071] figure 1 and figure 2 A flow chart of the face detection and tracking method in this embodiment is shown. Such as figure 1 As shown, the face detection and tracking method includes the following steps:
[0072] S11: Collect an image and perform depth detection processing on the image to obtain the depth value of each pixel in the image. It can be understood that each frame of image consists of I×J pixels, and each pixel (i, j) in the image refers to the pixel in row i and column j, and the depth value of pixel (i, j) is d(i,j). In an embodiment, a depth sensor is used to perform depth detection processing on the collected image, so as to obtain a depth value d(i, j) of each pixel point (i, j).
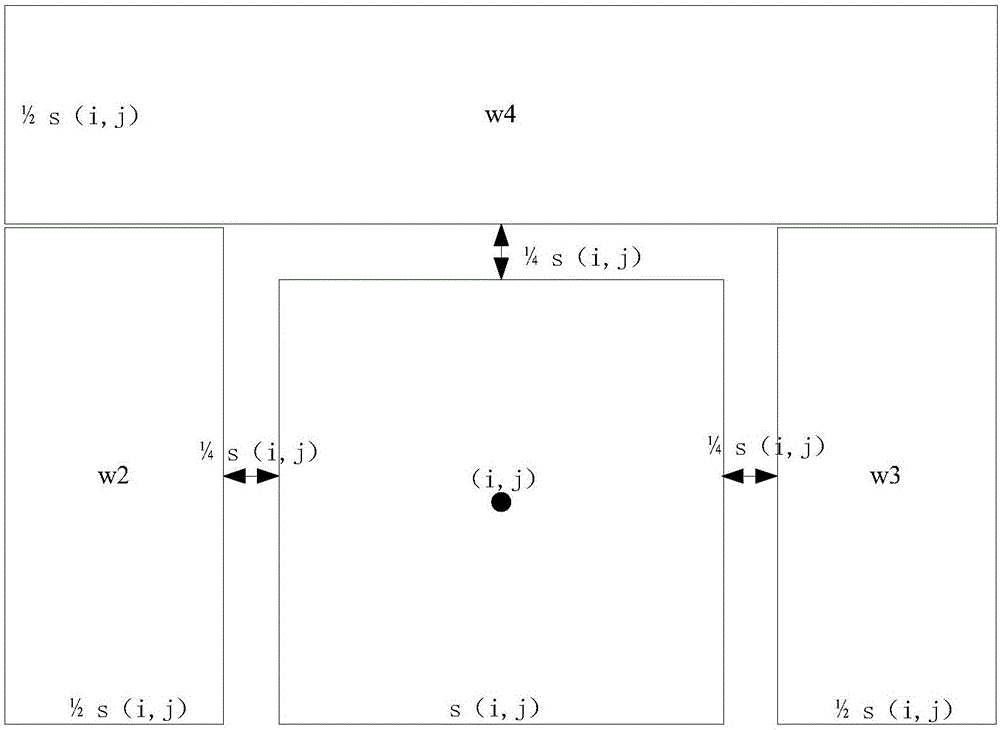
[0073] S12: Determine the face candidate area according to the depth value d(i, j) of each pixel point (i, j) of the current frame image. It can be understood that the face candidate area is an area where a human face may exist, and then using the face detection method to...
Embodiment 2
[0092] Figure 4 The method for controlling the head rotation of the robot in this embodiment is shown. Wherein, the robot is built with a camera device for collecting images, a depth sensor and a processor for detecting the depth of the image. The head rotation control method of the robot is mainly executed by a processor, and includes the following steps:
[0093] S21: the central area of the preset image. Such as Figure 5 As shown, the lower left corner of the current frame image is the origin O to establish a coordinate system OXY, the width of the preset image is w, and the height is h; if the width of the central area of the preset image is 0.1w, the height is 0.1h; Assuming that the center of the central area of the image is located at the center of the preset image, the coordinates of the center A of the central area of the preset image are (0.5w, 0.5h). Correspondingly, the coordinates of the lower left corner of the central area are (0.45w, 0.45h), the c...
Embodiment 3
[0101] Figure 6 A block diagram of the face detection and tracking device 1 in this embodiment is shown. Such as Figure 6 As shown, the face detection and tracking device 1 includes:
[0102] The depth detection processing module 10 is configured to collect an image and perform depth detection processing on the image, and obtain a depth value of each pixel in the image. It can be understood that each frame of image consists of I×J pixels, and each pixel (i, j) in the image refers to the pixel in row i and column j, and the depth value of pixel (i, j) is d(i,j). In an embodiment, a depth sensor is used to perform depth detection processing on the collected image, so as to obtain a depth value d(i, j) of each pixel point (i, j).
[0103] The human face candidate area determination module 20 is configured to determine the human face candidate area according to the depth value d(i, j) of each pixel point (i, j) of the current frame image. It can be understood that the face ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com