A Hip Assist Device Based on Parallel Mechanism
A technology of a power assist device and a hip joint, which is used in the lower limb power assist device and medical field, can solve problems such as unfavorable rehabilitation training, interference and injury, and less degrees of freedom, achieve good kinematic performance and stiffness characteristics, avoid additional interference and energy. Loss, the effect of reducing the occupied volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
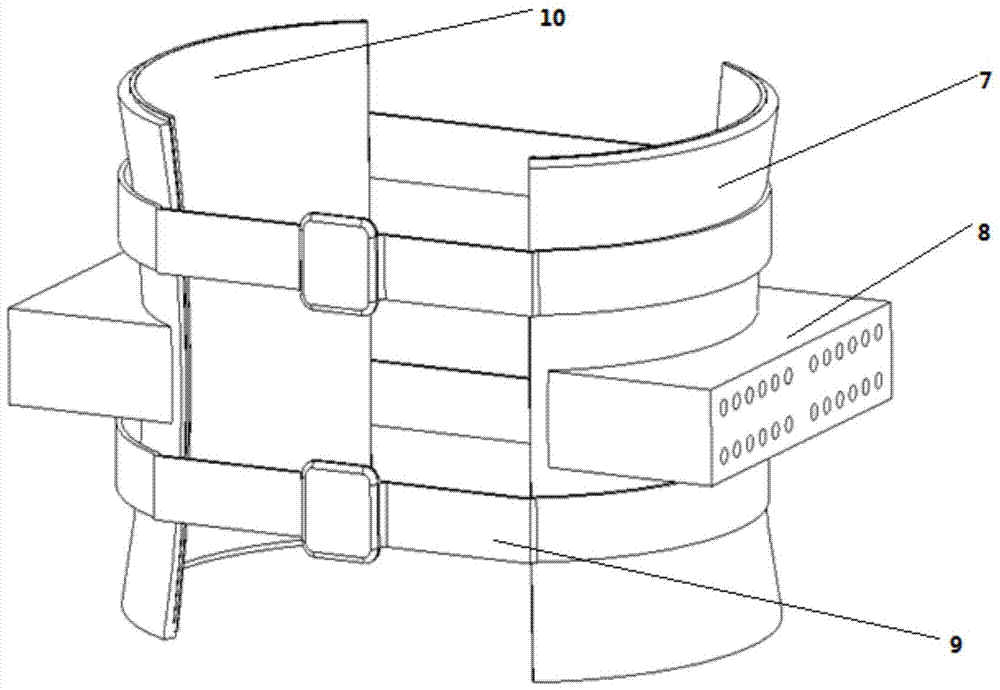
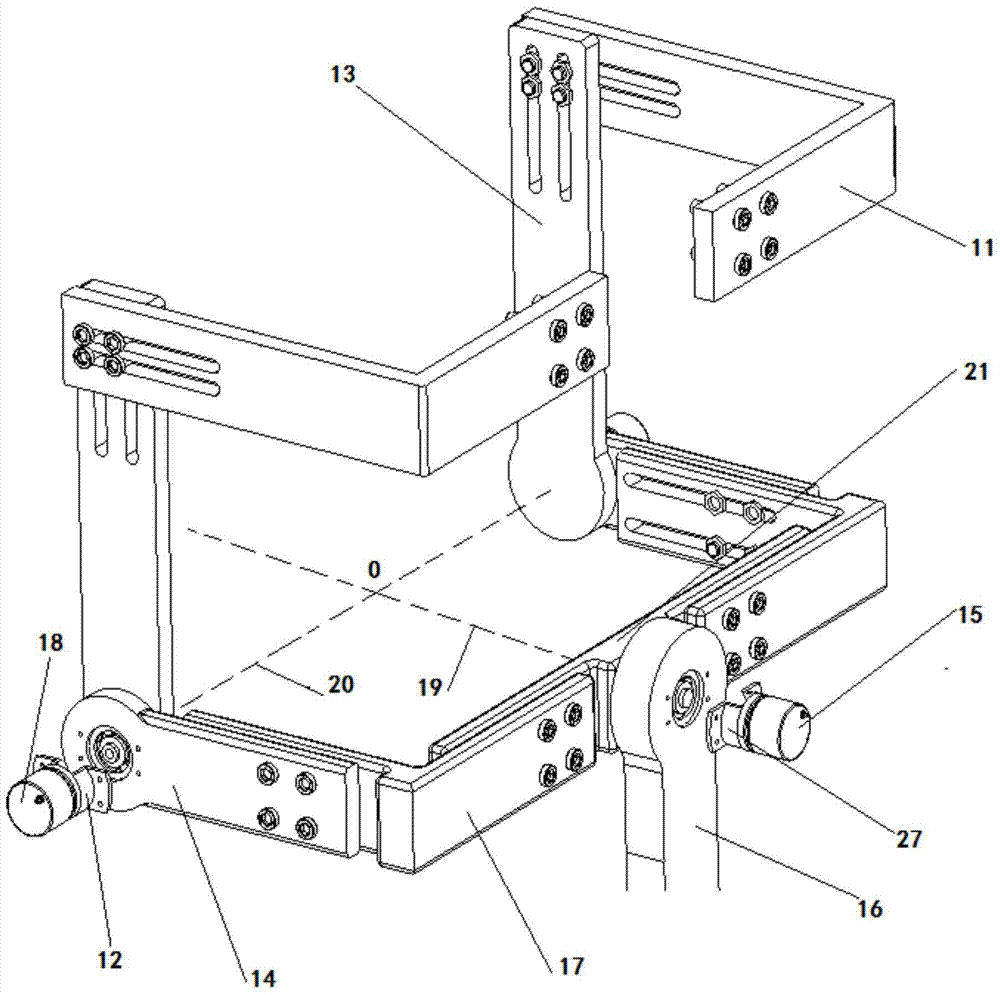
[0029] Such as Figure 1-Figure 10 As shown, the present invention is a hip joint assisting device based on a parallel mechanism: it includes a lumbar support assembly (1), two sets of restraint assemblies (2) and two sets of executive assemblies (3): the executive assembly (3) includes leg Clamping subassembly (4), sensor subassembly (5), base plate (6) and two active branch chain subassemblies (41), the active branch chain subassembly (41) is respectively connected with the waist support assembly (1) and the base plate ( 6) Fixed connection, which is a branch chain of UPS (U represents the Hooke pair, P represents the moving pair, S represents the ball pair) symmetrically distributed front and rear relative to the human leg, and the sensor subassembly (5) is respectively connected to the leg tightening subassembly (4) is fixedly connected with the constraint assembly (2).
[0030] As an example, such as figure 2 As shown, the described lumbar support assembly (1) includes a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com