Industrial robot for gear machining
A technology of industrial robots and gears, applied in metal processing, manipulators, manufacturing tools, etc., can solve the problems of low processing efficiency and low processing accuracy, achieve low cost, improve processing efficiency and processing accuracy, high dust prevention and anti-interference effect of ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
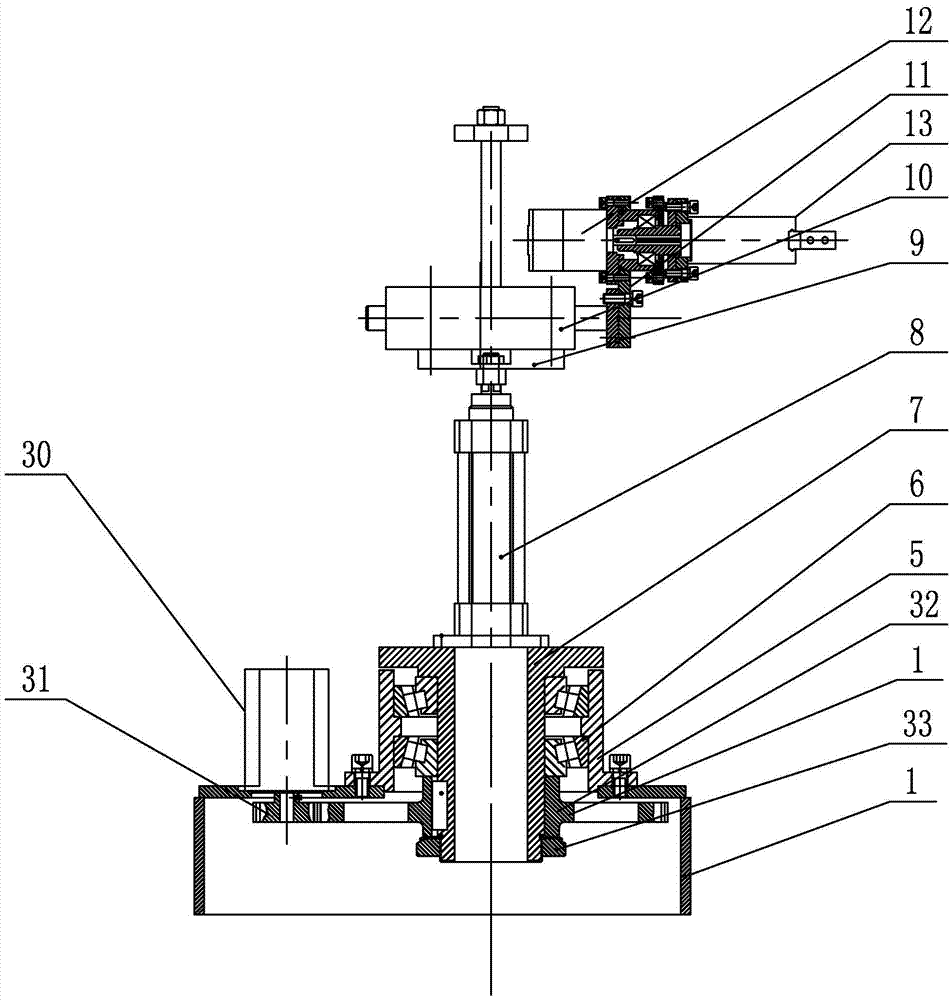
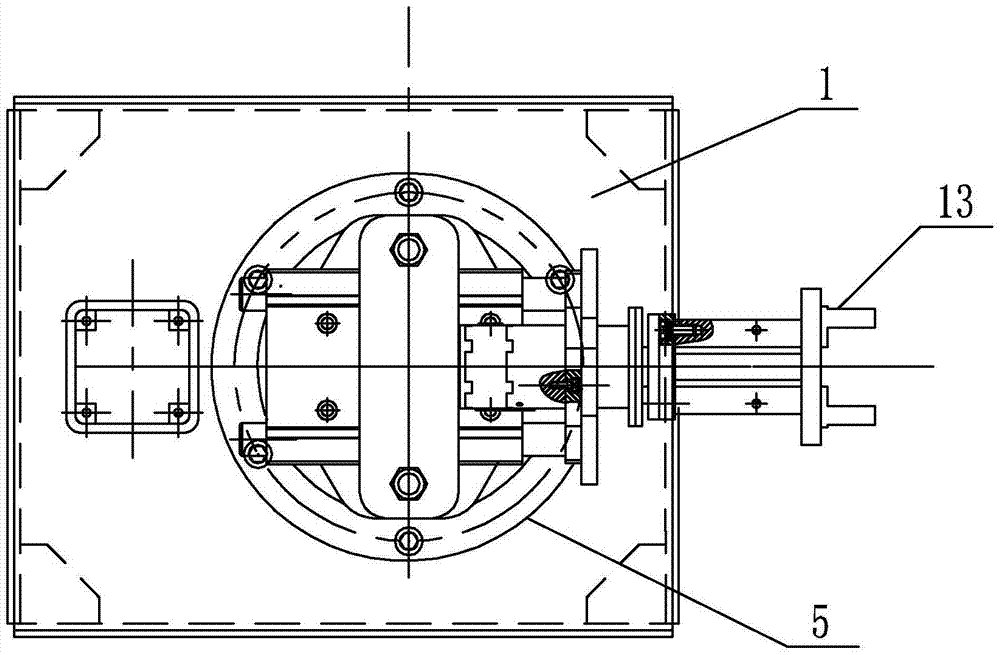
[0021] Specific implementation mode one: as Figure 1~6 As shown, the industrial robot for gear processing in this embodiment includes a bottom. The industrial robot includes a base 1, a spindle drive device 2, a spindle bearing seat 5, a rotating spindle 7, a lifting cylinder 8, an arm cylinder 10, and an arm transition plate 11. , wrist portion 12, pneumatic gripper 13 and two main shaft bearings 6, the main shaft bearing seat 5 is fixed on the upper end surface of the base 1, the rotating main shaft 7 is vertically installed on the main shaft bearing seat 5 through the two main shaft bearings 6, the main shaft The driving device 2 drives the rotating main shaft 7 to rotate, the cylinder body of the lifting cylinder 8 is fixed on the upper end surface of the rotating main shaft 7, the cylinder body of the arm cylinder 10 is fixed on the upper end surface of the piston rod of the lifting cylinder 8, and the wrist part 12 passes through the arm. The transition plate 11 is inst...
specific Embodiment approach 2
[0028] Specific implementation mode two: as figure 1 As shown, the main shaft driving device 2 of this embodiment includes a second stepping motor 30, a pinion 31, a bull gear 32 and a ring nut 33, the second stepping motor 30 is fixed on the upper end surface of the base 1, and the pinion 31 is fixed on the upper end surface of the base 1. Set on the output shaft of the second stepping motor 30, the bull gear 32 is fixedly sleeved on the bottom of the rotating main shaft 7, the ring nut 33 is threaded on the lower end of the rotating main shaft 7, and the pinion 31 and the bull gear 32 mesh with each other. Such a design can ensure high transmission precision and large transmission torque, and can ensure the transmission torque of mechanisms such as robot arms and grippers. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0029] Specific Embodiment Three: In this embodiment, the main shaft driving device 2 is a geared motor, and the geared motor is installed on the lower end surface of the panel of the base 1, and the lower end of the output shaft of the geared motor to rotate the main shaft 7 is affixed. Such a design can lower the overall center of gravity of the robot and enhance its stability. Other components and connections are the same as those in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com