Method for mechanical fault diagnosis based on information entropies and evidence theory
A technology of mechanical failure and evidence theory, applied in the direction of informatics, electrical digital data processing, special data processing applications, etc., can solve problems such as wrong diagnosis results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
preparation example Construction
[0083] Step:6: Evidence synthesis. Using the improved evidence synthesis method based on the conflict between corrected evidences, the obtained basic probability assignment function is combined to obtain the synthesis result. Specifically include the following steps:
[0084] Step 6.1: Calculate the distance function between pairs of evidence according to the Mingshi distance;
[0085] m i ,m j (i,j=1,2,...,M) is the recognition frame Θ={R 1 , R 2 , R 3 , R 4}'s two BPAs, the construction method is shown in formula (11).
[0086] m i ( R l ) = p 1 ...
Embodiment 1
[0114] Embodiment 1: It is assumed that the measurement environment is good and the accuracy of the sensor is good. Under MATLAB simulation conditions, simulate a misalignment fault, assuming that the number of sensors M = 4, the information entropy weight w 1 =w 2 =0.1,w 3 =w 4 =0.4, preset threshold ε=0.03, ε 1 =0.15,ε 2 =0.4, the beneficial effects of the present invention are simulated:
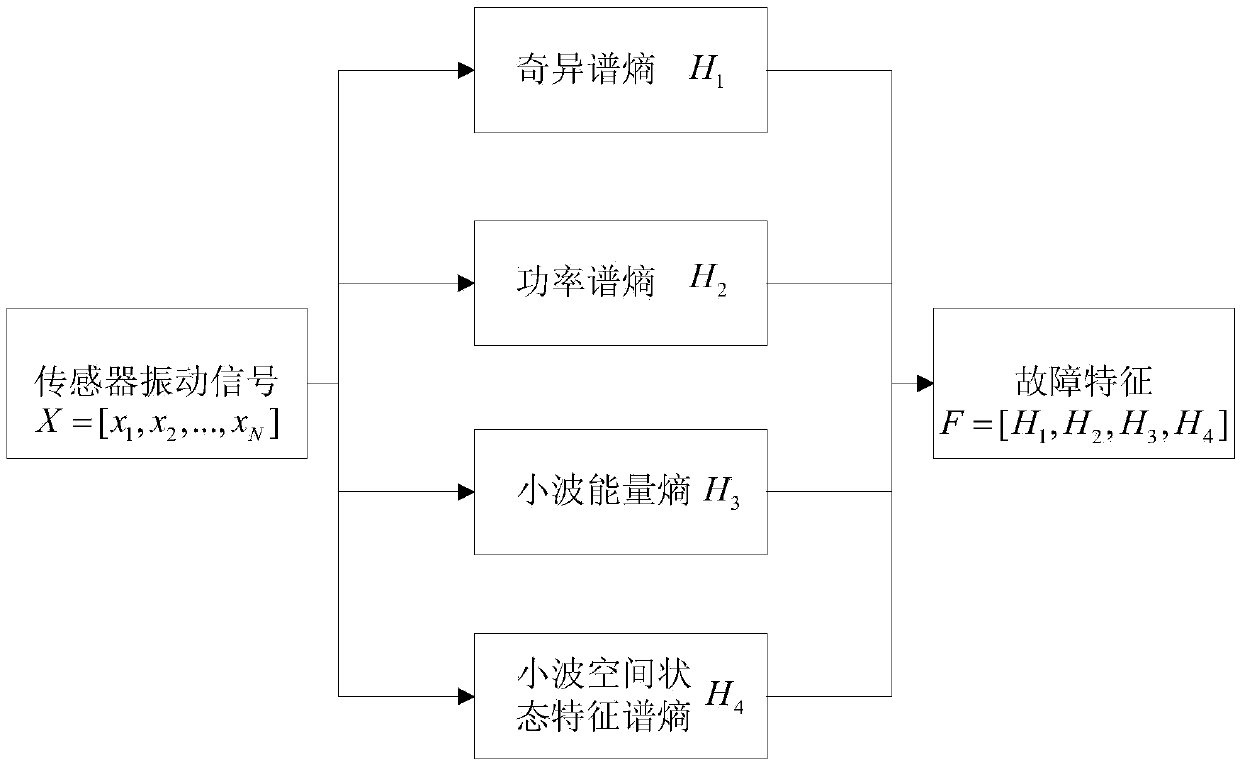
[0115] Fault characteristic reference values of typical mechanical fault types The specific value of is shown in Table 1, the fault characteristic F of the vibration signal received by the sensor j =[H j1 ,H j2 ,H j3 ,H j4 ] are shown in Table 2.
[0116] Table 1 Reference values of fault characteristics of four typical mechanical fault types
[0117]
[0118] Table 2 Fault characteristics of vibration signals of four sensors
[0119]
[0120] Basic probability assignment function m for sensor assignment to typical mechanical failure types i (R j ) is shown in Ta...
Embodiment 2
[0131] Embodiment 2: It is assumed that the measurement environment is harsh and the accuracy of the sensor is poor. Under the MATLAB simulation condition, simulate a misalignment fault, the setting of concrete parameter is identical with embodiment 1, and the beneficial effect of the present invention is carried out simulation experiment:
[0132] Obtain the fault feature F of the sensor vibration signal j =[H j1 ,H j2 ,H j3 ,H j4 ], the specific values are shown in Table 6.
[0133] Table 6 Fault characteristics of vibration signals of four sensors
[0134]
[0135] Basic probability assignment function m for sensor assignment to typical mechanical failure types i (R j ) is shown in Table 7.
[0136] Table 7 The basic probability assignment function assigned by the sensor to each typical mechanical fault type
[0137]
[0138] It can be seen from Table 7 that now the sensor S 1 , S 2 , S 3 Both use the maximum degree of confidence to judge that the type o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com