Robust adaptive optimal control-based pilot manipulation behavior description method
A robust adaptive and optimal control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of poor robustness, inapplicability, and not reflecting the gradual adaptation process of human beings.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0093] The accuracy and superiority of the model of the present invention are illustrated below through two examples. Embodiment 1 proves the accuracy of the present invention in describing the frequency-domain characteristics of the pilot's behavior by comparing flight test data. The comparison of the second embodiment with the OCM model proves the applicability of the present invention in the presence of unmodeled dynamics and unknown environmental disturbances.
[0094] (1) Embodiment one
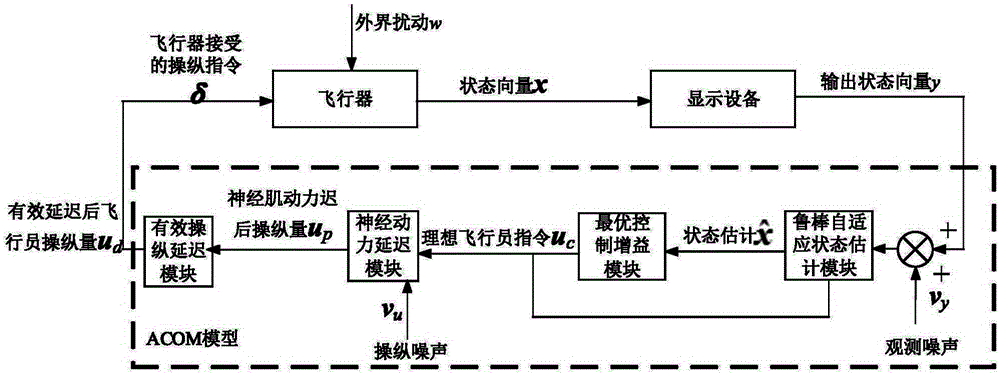
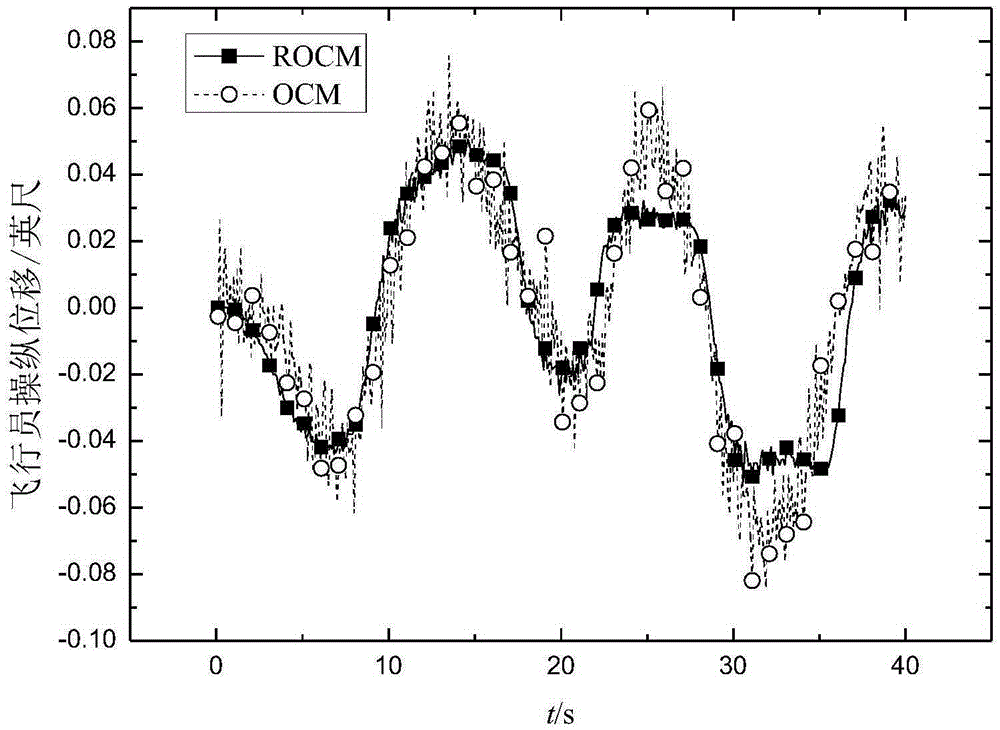
[0095]In this embodiment, the ROCM model and the OCM model are used respectively, and according to the actual flight test conditions, the pilot's manipulation is simulated to track the pitching attitude of the aircraft, and the flight test is simulated and reproduced. Firstly, the man-machine closed-loop time domain response is obtained, and then the time domain response is converted into frequency domain characteristics and compared with the test data, finally proving the accuracy of t...
Embodiment 2
[0124] In this embodiment, based on Embodiment 1, the unmodeled dynamics and unknown environmental disturbances are introduced as follows:
[0125] θ δ e s = 8 · 70 2 s 2 + 2 × ( 0.7 + Δ ξ ) × 70 + 4900 · 5.5 ( s + 1.8 ) e ( - 0.04 + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com