Fast control prototype realization method of active rear wheel steering
A technology of rear wheel steering and fast control, which is applied in the direction of vehicle steering/bump performance, can solve problems such as high cost and long development cycle, and achieve the effects of increasing development speed, reducing development cost, and shortening development cycle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] Exemplary embodiments of the present invention are described in detail below with reference to the accompanying drawings.
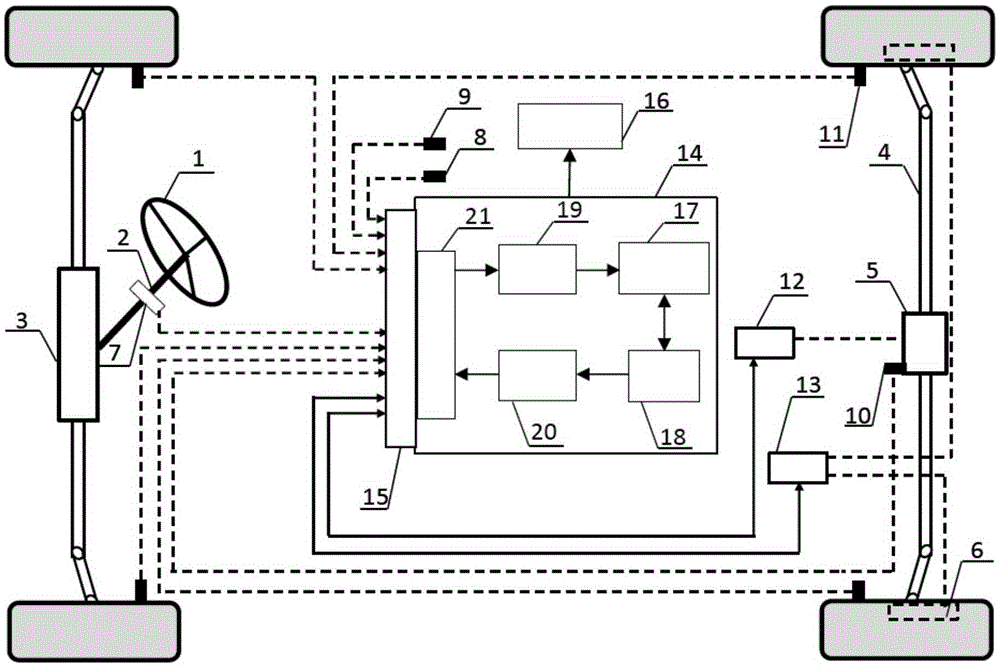
[0013] Such as figure 1 Shown is a schematic diagram of the structure of a rapid control prototype implementation method for active rear wheel steering. At first, carry out dynamic analysis to active rear wheel steering system, set up its mathematical model, according to established mathematical model, set up controller model (18), rear wheel active steering system in industrial computer (14) MATLAB / Simulink software platform The vehicle dynamics model (17), the input signal processing module (19), and the output signal processing module (20). The effectiveness of the controller is verified by off-line digital simulation of the active rear wheel steering system using simulation tools. Secondly, steering wheel angle sensor (7), yaw rate sensor (8), lateral acceleration sensor (9), rear wheel steering motor displacement sensor (10), wheel speed sen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com