Robust control method of three-DOF model helicopter with output limits
A robust control and helicopter technology, applied in the field of robust control, can solve complex, unrealizable system control laws, unstable multi-variable, nonlinear multiple-input multiple-output systems and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
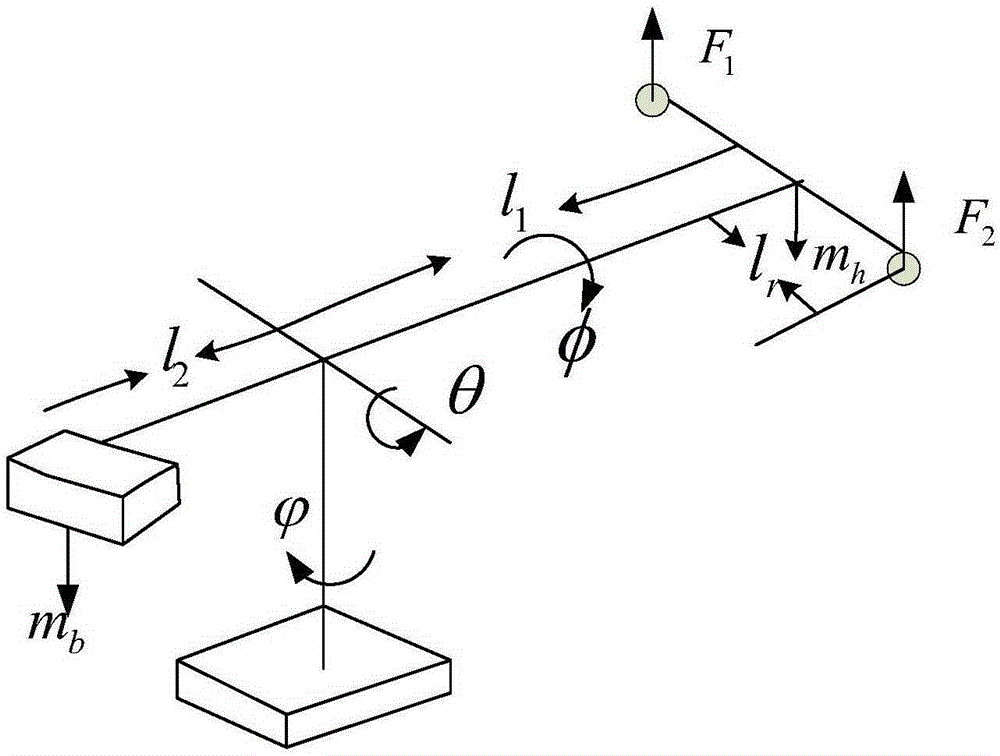
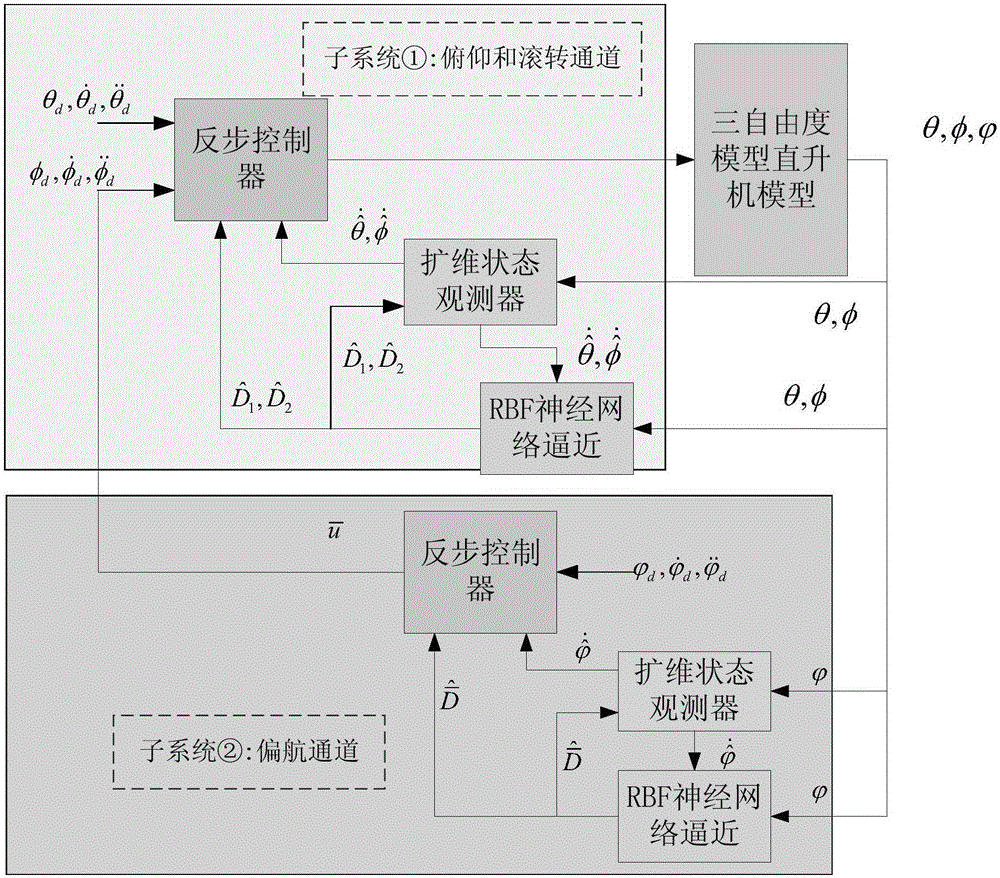
[0070] The present invention designs a robust control method for a three-degree-of-freedom model helicopter with limited output. According to the motion characteristics of the three-degree-of-freedom model helicopter, the three-degree-of-freedom model helicopter system is decomposed into subsystems composed of pitch and roll channels① and the subsystem composed of the yaw channel②. The method is implemented based on a closed-loop control system composed of subsystem ① and subsystem ②, which includes the following steps:
[0071] First, the three-degree-of-freedom model helicopter system is decomposed into a subsystem consisting of pitch and roll channels ① and a yaw channel ②, which is characterized in that it includes the following steps
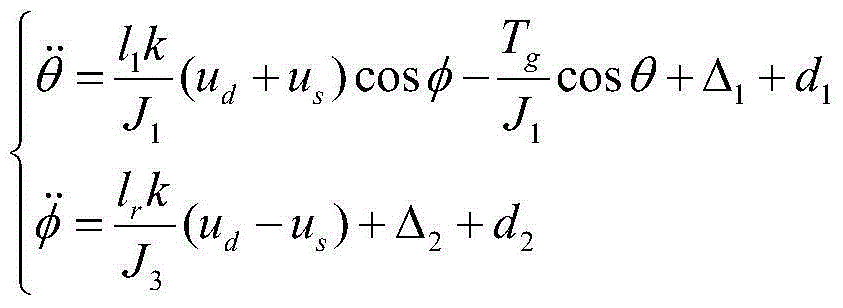
[0072] (1) Transform the control systems of subsystem ① and subsystem ② into the form of affine nonlinear system equations respectively;
[0073] (2) Design robust controllers according to the affine nonlinear system equations of subsystem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com