Automatic polishing robot device for large-sized workpiece
A technology for large workpieces and industrial robots. It is applied in the direction of grinding/polishing safety devices, grinding workpiece supports, grinding machines, etc. It can solve the problems of low grinding accuracy, low grinding efficiency, and poor processing environment, and achieve safety and protection. environmental effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
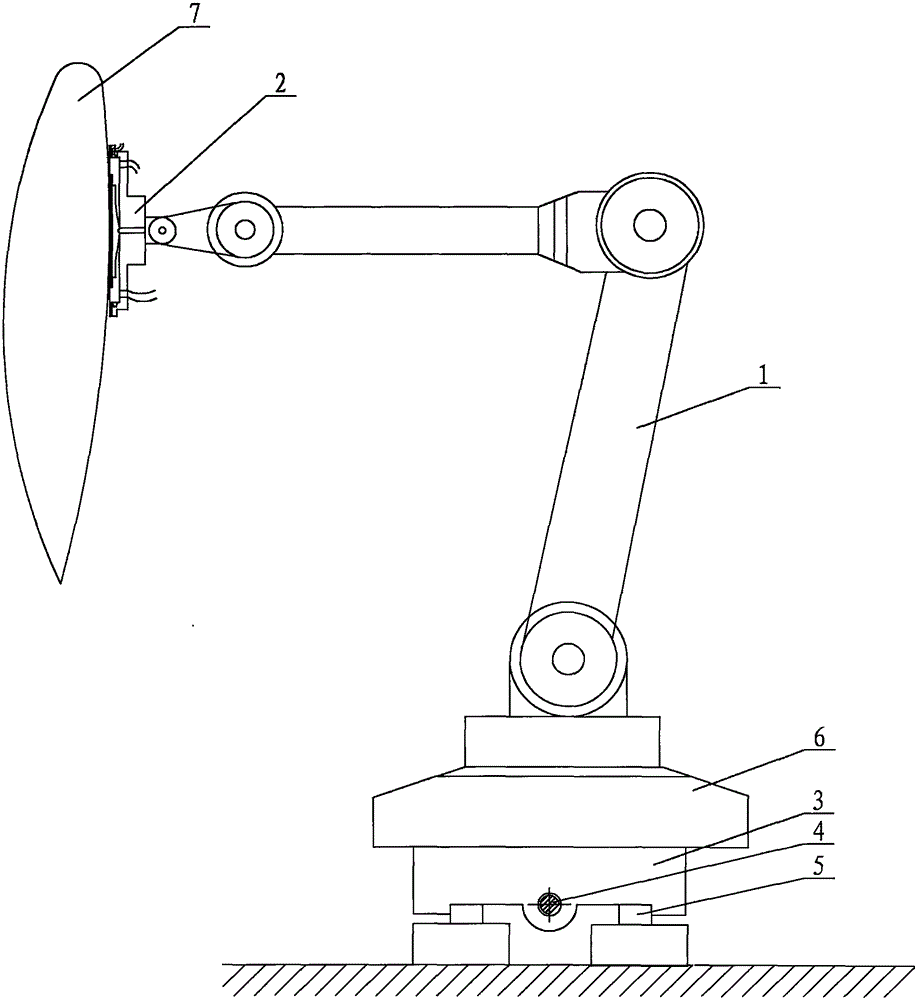
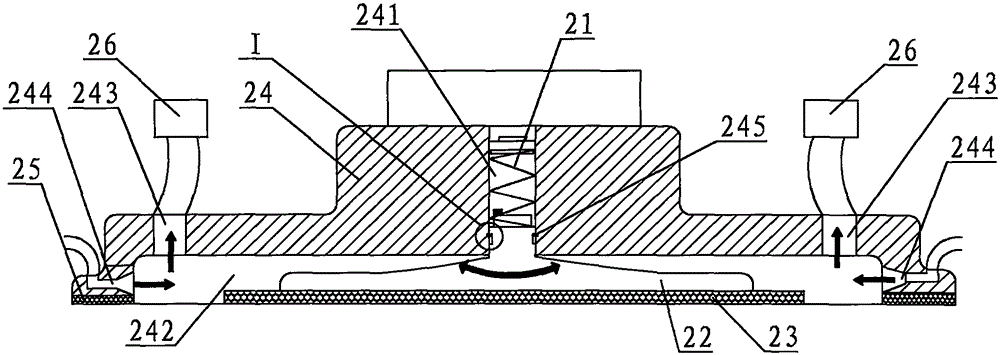
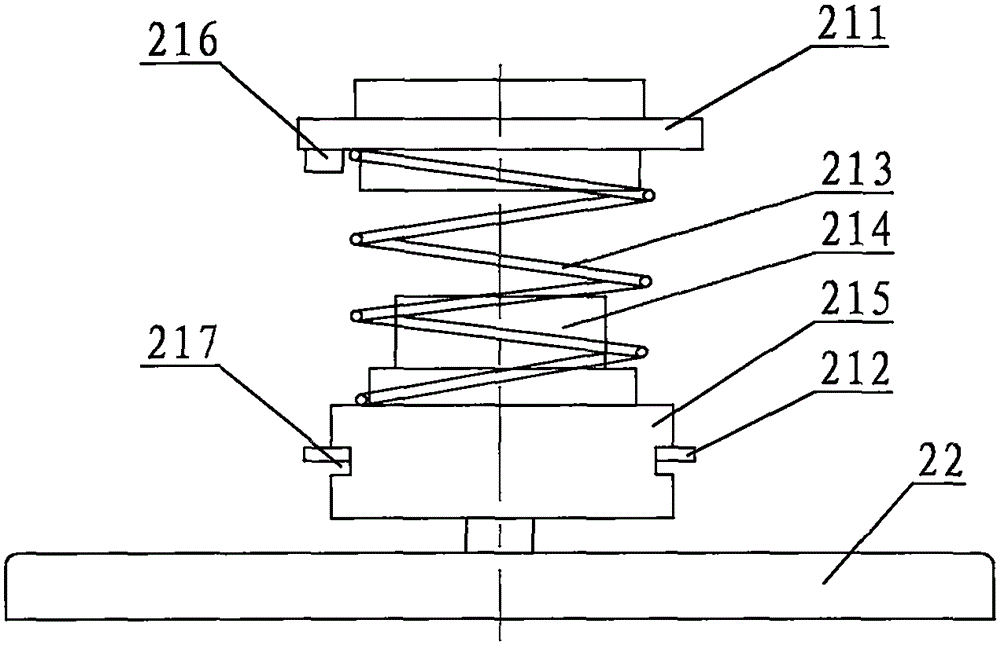
[0017] Specific implementation mode one: combine Figure 1 to Figure 5 Describe this embodiment, this embodiment comprises industrial robot 1, grinding device 2, mobile platform 3, lead screw 4, track 5 and base 6, the tail of industrial robot 1 is fixed on the mobile platform 3 by base 6, mobile platform 3 is threadedly connected with the lead screw 4, the lead screw 4 is driven by the driving motor, the mobile platform 3 is slidably connected with the rail 5, the length direction of the guide rail 5 is parallel to the length direction of the workpiece fixture (not shown), and the grinding device 2 is installed in the industrial The end of the robot 1; the grinding device 2 includes a buffer assembly 21, a vacuum chuck 22, grinding paper 23, a resin cover 24, an annular felt 25 and two negative pressure adsorption devices 26, and the buffer assembly 21 includes an upper contact plate 211, a retaining spring 212, buffer spring 213, drive motor 214, lower contact plate 215 and ...
specific Embodiment approach 2
[0018] Specific implementation mode two: combination figure 2 with image 3 The present embodiment will be described. The material of the vacuum chuck 22 of the present embodiment is cemented carbide. The rigidity of cemented carbide is good, which can maintain a large enough contact force between the vacuum chuck 22 and the workpiece 7 . Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0019] Specific implementation mode three: combination Figure 5 To describe this embodiment, the lower end surface of the vacuum chuck 22 of this embodiment is provided with an annular groove 222 . By adopting a suction cup with an annular groove, it is easy to form a negative pressure on the surface of the suction cup, thereby realizing the adsorption of the grinding paper. Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com