Design method of variable-structure controller for double teleoperation with feature of time-varying delay
A design method and controller technology, applied in instrumentation, computing, special data processing applications, etc., can solve the problem that control information is easily affected by time delay and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
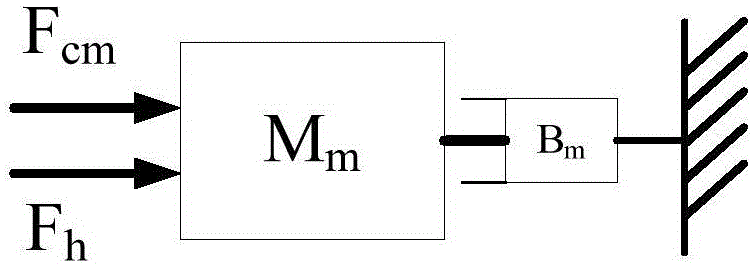
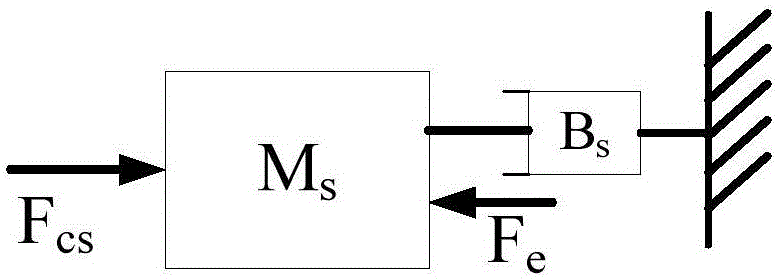
[0120] Step 1: Establish the dynamic model and delay model of the master and slave.
[0121] Establish the model according to formula (1-1), formula (1-2) and formula (1-3). The specific parameter selection is shown in the table below:
[0122]
[0123] Formula (1-4) expects the force relationship between the master end and the slave end: k f =10
[0124] Establish the desired positional relationship between the master and the slave, select α 1 = α 2 = α 3 =0.5
[0125] In case of delay:
[0126] d, d in formula (1-6), formula (1-7) and formula (1-8) 1 、d 2 The uniform noises with mean values of 500ms, 400ms and 200ms are selected respectively, all of which are time-varying functions.
[0127] Step 2: Master controller design
[0128]The main end adopts the impedance controller, because if the slave end adopts the proportional tracking position and force information of the main end, it will cause the master end and the slave end of the whole system to be connect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com