A fault-tolerant control device and method for a quadrotor helicopter aiming at state time lag
A fault-tolerant control, four-rotor technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problems of control system vibration, flight performance impact, etc., achieve convenient operation, solve fault-tolerant control capabilities, and cost-effective Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further explained below in conjunction with the drawings.
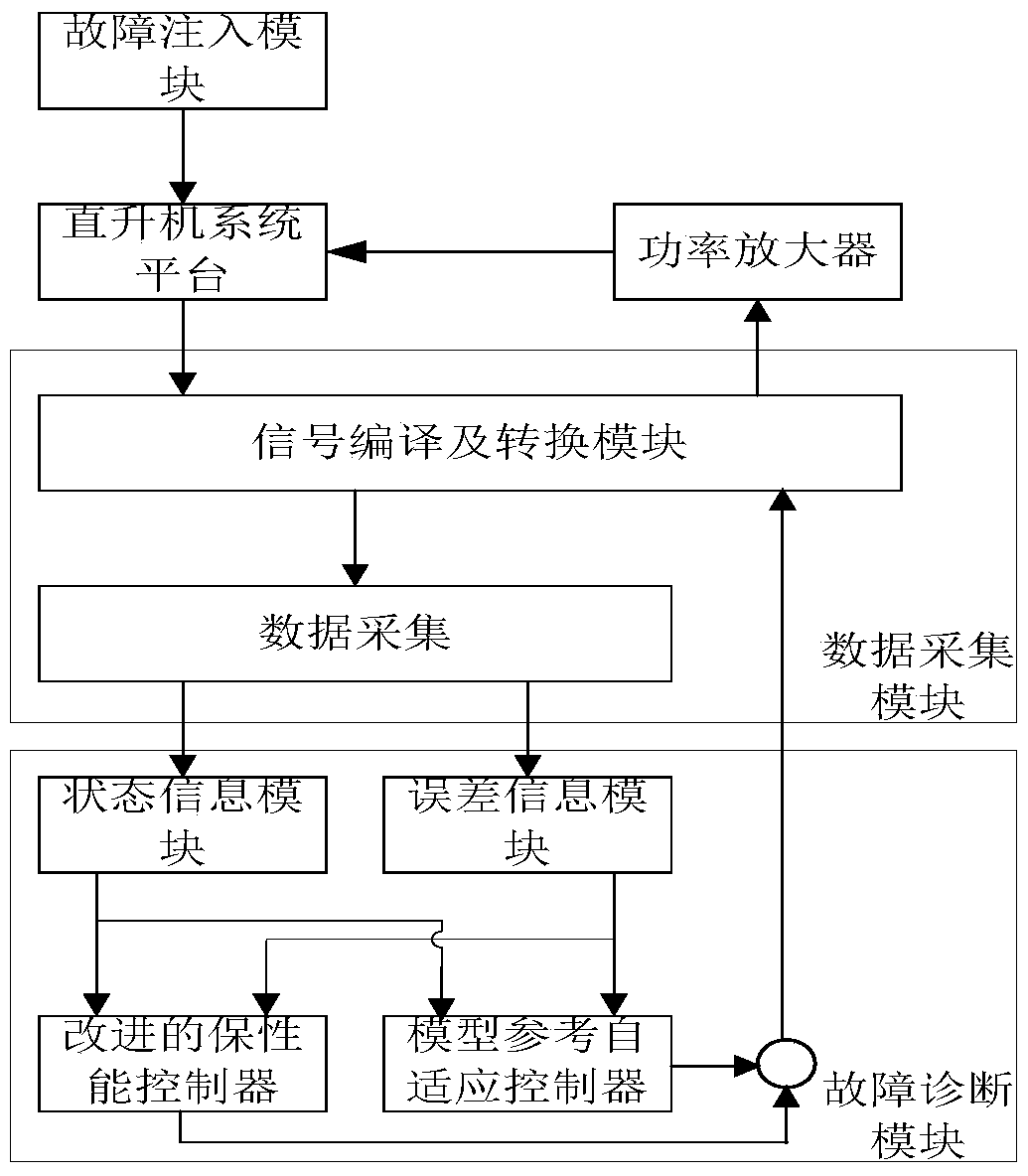
[0041] Such as figure 1 As shown, the quad-rotor helicopter fault-tolerant control device for state time delay of the present invention includes a fault injection module, a helicopter system platform, a data acquisition module, a fault diagnosis module, and a power amplifier.
[0042] The fault injection module is connected to the helicopter system platform to inject simulated fault information into the helicopter system platform;
[0043] The data acquisition module collects the status information and error information of the helicopter through the built-in sensors of the helicopter system platform;
[0044] The fault diagnosis module is connected with the data acquisition module, receives the status information and error information from the data acquisition module, obtains the fault-tolerant control law, and resends the fault-tolerant control law to the data acquisition module;
[0045] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com