Spring wheel-leg creeping device of bionic amphibious robot
An amphibious and crawling device technology, used in motor vehicles, transportation and packaging, etc., can solve the problems that it is difficult to fully meet the robot's speed, obstacle crossing, mobility, stability, etc., achieve compact structure, increase contact time, and can Good control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in further detail below in conjunction with the accompanying drawings.
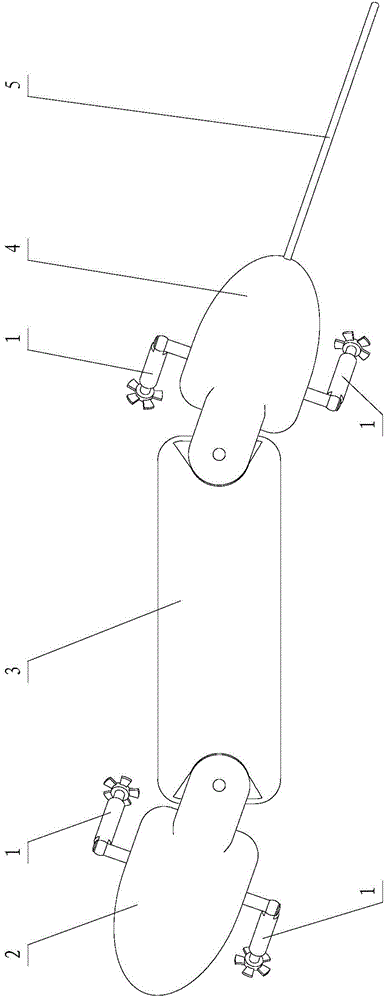
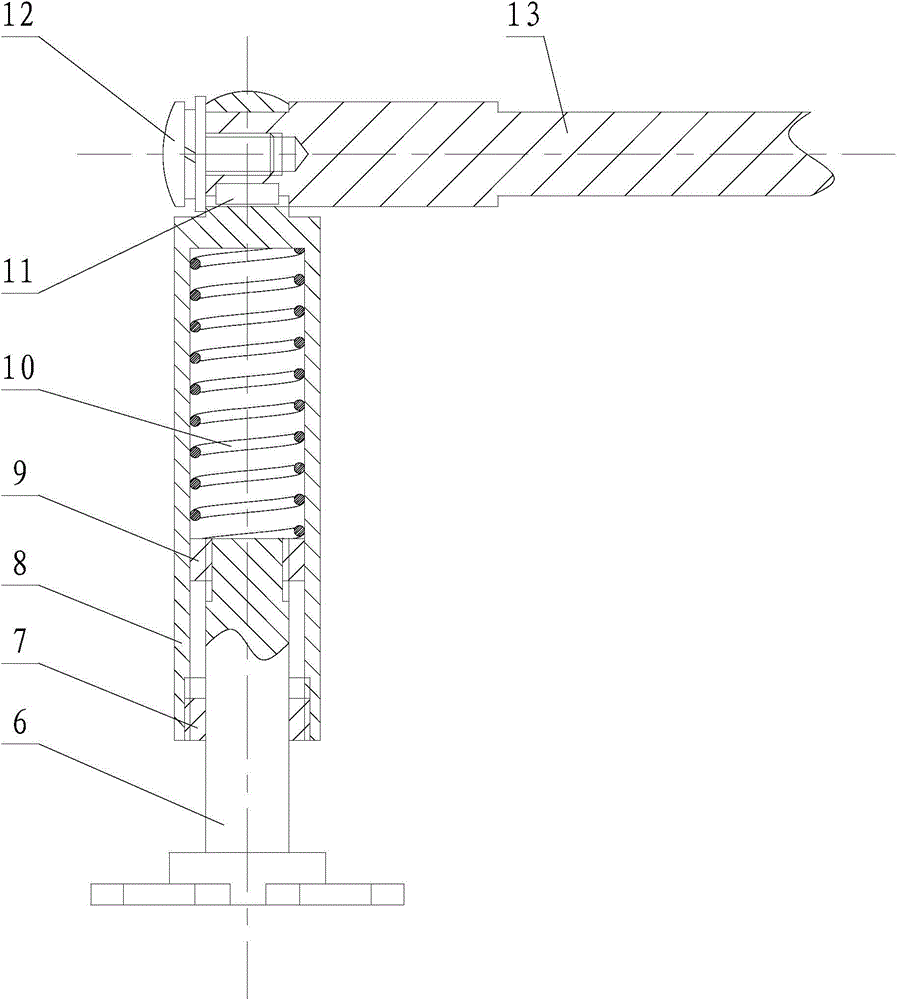
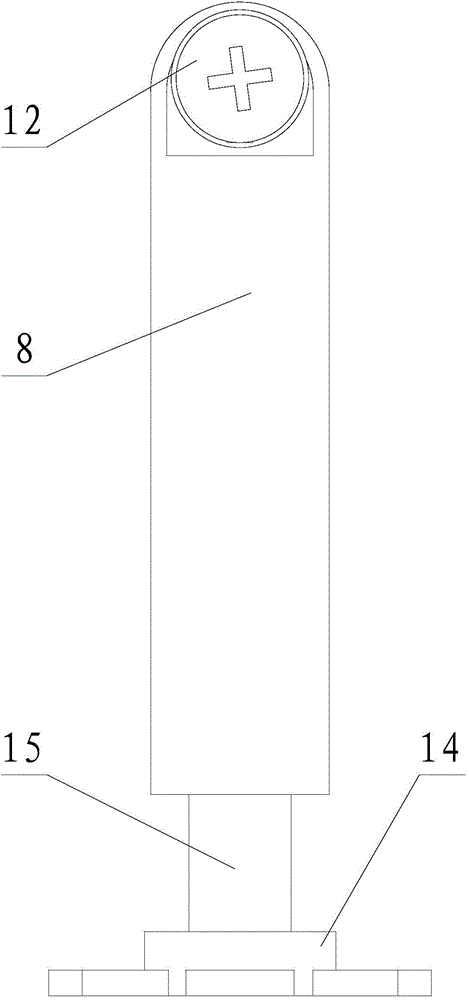
[0019] Such as Figure 2~4 As shown, the present invention includes wheel foot 6, lock nut, sleeve 8, compression spring 10, connection key 11, lock screw 12 and rotating shaft 13, wherein lock nut comprises outer lock nut 7 and inner lock nut The nut 9 and the wheel foot 6 include a foot plate 14 and a sliding rod 15 .
[0020] One end of the rotating shaft 13 is connected with the drive unit installed in the bionic amphibious robot, and the spring-type wheel-foot crawling device 1 is driven by the driving unit to rotate around the rotating shaft 13. One end of the sleeve 8 has a fixing hole, and the rotating shaft The other end of 13 has threaded hole, and the other end of rotating shaft 13 passes through described fixing hole, and is fixedly connected with sleeve 8 by connecting key 11 and locking screw 12, and sleeve 8 is driven to rotate by rotating sha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com