Hydraulic motor preset performance tracking control method with hysteresis compensating
A hydraulic motor, tracking control technology, applied in the field of control, can solve the problems of phase lag, system instability, high gain feedback, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
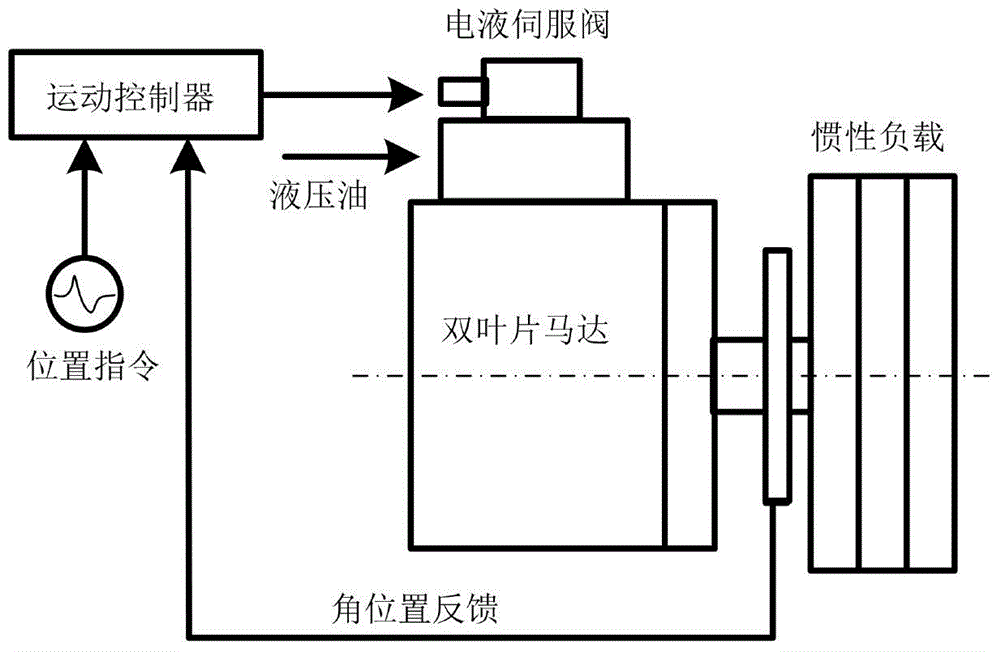
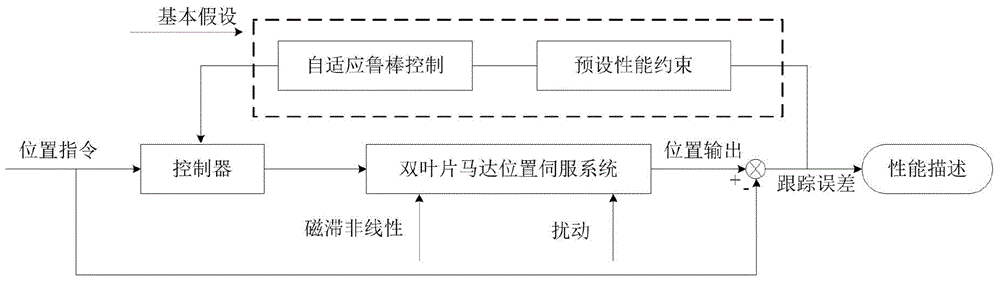
[0054] Combine figure 1 , figure 2 with Figure 8 , The specific steps of a hydraulic motor preset performance tracking control method with hysteresis compensation are as follows:
[0055] Step 1. Hysteresis characteristic model. Due to the discontinuous characteristics of the traditional gap hysteresis model, it is very unfavorable for the controller design of the nonlinear system. The present invention uses the following hysteresis model:
[0056] du dt = α | dv dt | ( cv - u ) + B 1 dv dt - - - ( 1 )
[0057] In formula (1), u is the output of the hysteresis model, that is, the effective control input voltage, c, α and B 1 Is the hysteresis characteristic parameter, and satisfies c>B 1 , V is the output control quantity of the controller, and specific expressions will be given in the subsequent controller design. Formula (1) can be transformed into:
[0058]
[0059] U in formula (2) 0 And v 0 Represents the initial...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com